1971년부터 1986년까지 20대가 발사된 KH-11은 초기엔 필름 촬영식 정찰위성이었지만 준실시간 정찰 능력을 확보할 수 있게 개량됐었네요.
위성으로 적의 공격 징후를 즉시 파악하기 위해 필요한 준실시간(촬영 후 1시간 이내 영상 확보) 정찰 능력을 확보하기 위해서 전자광학영상(EOI; electro-optical imaging) 체계 외에도, 위성 자체에서 필름을 현상한 뒤 별도의 통신 위성을 통해 지상으로 전달하는 FROG(Film Read Out GAMBIT) 방식이 경쟁했었습니다. FROG를 단기적 실용안으로 개발한다는 계획이 있었지만 폐기되고 1976년 EOI 기반의 KH-11이 발사됐다고 합니다.
초기형에는 지도제작 카메라가 별도로 있었지만 1982년 17호기부터는 이를 빼고 주카메라로 지도제작이 가능해졌다고 하네요.
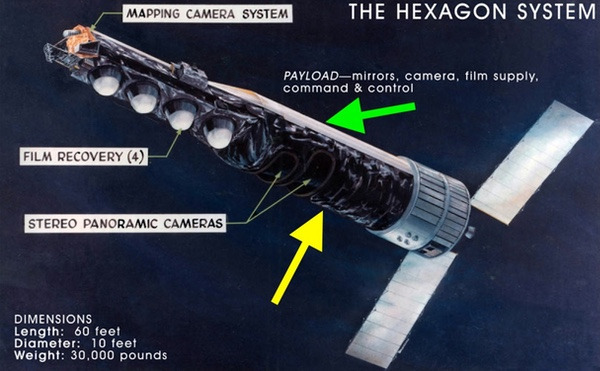
HEXAGON HEXAGON 정찰 위성은 1971년 여름에 실전 배치되었다. HEXAGON에는 두 개의 강력한 카메라가 있었고, 재진입체에서 회수되는 필름을 사용했다. 1970년, 카메라 제조사 퍼킨엘머는 위성이 주 임무를 완료한 뒤 궤도에서 거의 실시간으로 영상을 제공하는 기능을 추가하자고 제안했다. 이 제안은 추진되지 않았지만, 1980년대에 이르면 마지막 몇 기의 위성에는 지상 표적의 적외선 영상을 제공할 수 있는 성표시기(스타 트래커) 시스템이 탑재되었다. 이것은 현재 미국 공군 국가박물관에 전시 중인 공학 모델이다. (출처: 드웨인 데이)
라이브, 빅 버드입니다! HEXAGON 위성과 준실시간 정찰 드웨인 A. 데이 2025년 11월 3일 월요일
1970년 말, 퍼킨엘머는 HEXAGON 필름 정찰 위성을 수정해 준실시간 정찰을 수행할 수 있게 하자는 다소 대담한 제안을 했다. 당시 제안이 이례적이었던 이유는 HEXAGON이 아직 발사되지 않았고, 그 전 몇 년 동안 여러 차례 지연과 비용 초과를 겪어 일정이 뒤처져 있었기 때문이다. 그러나 회사는 보다 신속한 위성 영상의 필요성에 관한 정보공동체 내부의 지속적인 논의에 대응하고 있었다. 퍼킨엘머의 제안은 당시 채택되지 않았지만, 10년 뒤 회사는 자사 위성에 그러한 능력을 포함시켰다.
HEXAGON HEXAGON 위성은 스쿨버스 크기였다. 1971년부터 1986년까지 20기가 발사되었고, 마지막 한 기는 로켓이 발사대 상공에서 폭발하면서 파괴되었다. 만약 준실시간 정찰 시스템이 위성에 통합되었다면, 아마도 녹색 화살표로 표시된 영역, 즉 주 카메라 위쪽에 설치되었을 것이다. 마지막 기체에는 S-큐브드(S-Cubed)로 알려진 적외선 카메라가 장착되었는데, 노란 화살표로 표시된 위치에 있었다. 그 기체는 궤도에 오르지 못했다. (출처: NRO)
HEXAGON의 배경 HEXAGON 프로그램은 중·후반 1960년대에 CORONA 지역수색 위성을 대체하기 위해 시작되었다. HEXAGON의 목표는 소련의 광범위한 지역을 촬영하여 소련 무기체계를 식별하고 구분할 수 있을 만큼의 해상도를 확보하는 것이었다. 예를 들어 전차와 병력수송장갑차를 구분하는 식이다. HEXAGON은 코네티컷주 댄버리의 퍼킨엘머가 설계·제작했다. 원래 1970년에 발사할 계획이었지만, 기술적 문제로 1년 지연되었다.
그들은 적어도 부분적으로는 체코슬로바키아 침공 당시의 경험에 의해 자극을 받았다. 그때 소련 침공군은 미 정찰위성에 촬영되었지만, 필름은 침공이 발생한 후에야 확인되었다. HEXAGON에는 서로 반대 방향으로 회전하며 긴 필름을 노광하는 두 개의 강력한 카메라가 있었다. 필름은 우주선 뒤쪽의 대형 공급 릴에서 카메라를 거쳐 앞쪽의 네 개 재진입체로 이동했다. 재진입체가 가득 차면 필름이 절단되고, 재진입체는 밀봉되어 분리됐다. 그것은 지구 대기권에 재진입한 뒤 회수되었다. 필름은 뉴욕주 로체스터의 이스트만 코닥으로 운송되어 현상·복제된 뒤 워싱턴 DC로 보내져 분석되었다. 사진이 촬영된 시점부터 열람까지 며칠에서 몇 주가 걸릴 수 있었다. 시의성은 떨어졌지만, 각 HEXAGON 임무는 매우 넓은 지역을 아주 좋은 해상도로 촬영했기 때문에 비교적 짧은 기간에 막대한 양의 정보자료를 회수할 수 있었다.
CORONA, GAMBIT, HEXAGON의 필름 회수 시스템은 “전략 정찰”을 제공했다. 이는 소련 무기체계의 수량과 유형에 대한 평가를 의미한다. 이들은 잠재적 공격의 징후와 경보 제공을 목적으로 하지는 않았다. 그러나 1960년대 내내 위성 정보 프로그램을 관리하던 국가정찰국(NRO)은 사진정보를 더 빨리 제공할 수 있는 다른 잠재적 시스템을 평가했다. 그들은 적어도 부분적으로 체코슬로바키아 침공 당시의 경험에 자극을 받았는데, 그때 소련 침공군은 미 정찰위성에 촬영되었지만 필름은 침공이 벌어진 뒤에야 지상에서 확인되었기 때문이다.
1970년 초까지 “준실시간” 정찰을 위해 두 가지 개념이 검토되고 있었고, 이는 일반적으로 사진이 한 시간 내에 열람 가능함을 의미했다. 두 가지 개념은 전자광학 영상(EOI) 접근법과 필름 원격판독 GAMBIT, 즉 FROG였다.
HEXAGON 체코슬로바키아 침공 당시 프라하를 촬영한 CORONA 정찰위성 사진. 위성은 침공 이전 사진을 확보했지만, 지상에서 열람된 것은 침공이 벌어진 뒤였다. (출처: 해리 스트레인저)
HEXAGON을 위한 준실시간 1970년 말, 퍼킨엘머(P-E)는 NRO 관계자들에게 HEXAGON 위성에 준실시간 기능을 추가할 것을 제안했다. 퍼킨엘머는 아직 상세 연구를 수행하지 않았지만, 연구 수행을 승인·지원해 줄 것을 제안하고 있었다. 당시 P-E에는 이 개념에 대한 시스템 설명이 없었다. 그들은 단지 가능한 기술과 구성요소를 시사했을 뿐, 이에 대한 충분한 평가를 하지는 않았다. 회사는 연구를 수행할 승인과 예산뿐 아니라, 그러한 시스템이 무엇을 해야 하는지에 대한 정부의 더 나은 지침도 필요로 했다.
제안된 구성은 총 135일의 수명을 가질 것이었다. 고도 80해리(148킬로미터)에서 45일간의 HEXAGON 주 임무를 수행한 후, 위성은 124해리(230킬로미터)로 상향하여 추가 90일간 준실시간 운용을 제공할 예정이었다. 연간 네 차례의 HEXAGON 발사(각 145일 지속)는 궤도에서 연속적인 준실시간 능력을 제공할 것이다. 한 위성은 HEXAGON 주 임무를 수행하는 동안 다른 위성은 준실시간 임무를 수행하게 된다.
위성은 고도 상향뿐 아니라 연장 임무 동안의 공기저항 보정을 위해 추가 연료를 보유하게 된다. 그 연료와 준실시간 장비의 질량은 일부 보조 탑재체와 자위성(subsatellites)을 삭제함으로써 확보될 것이었다. 당시 HEXAGON에는 전방부에 장착된 위성을 궤도로 실어 나르는 계획이 있었다. 그 위성은 신호정보(SIGINT) 용도로 설계되었으며, 궤도에 전개된 후 자체 로켓 모터를 사용해 더 높은 궤도로 상승했다. 이를 삭제하고 취급 시스템을 제거하면 수백 킬로그램을 절감할 수 있었다. P-E가 어떤 다른 보조 탑재체의 제거를 제안했는지는 명확하지 않지만, HEXAGON은 20차례 임무 동안 전방부에 장착되거나 전개되는 여러 보조 탑재체를 운용했다.
해당 제안은 “유망해 보이는 매력적인 개념”이라 평가되었다고, 비식별 처리된 한 NRO 관계자는 기록에서 밝혔다. 준실시간 “모듈”은 별도의 필름 공급 및 권취부, 준실시간 필름 루퍼, 기내 필름 현상기와 스캐너, 데이터 전송 시스템으로 구성될 예정이었다. 모듈은 최대 13,000피트(3,960미터)의 필름을 보유한다. 현상과 정착 과정은 방사선과 열만 필요로 했다. 준실시간용 필름은 45일 주 임무 종료 시 주 필름의 끝에 접합(splice)될 것이다. 이는 두 개 중 하나의 카메라를 사용하여 단안(monoscopic) 영상을 제공하게 되는데, 반면 두 카메라를 함께 쓰면 지상 물체의 높이를 계산할 수 있는 입체(stereoscopic) 영상을 얻을 수 있었다.
처리된 필름은 레이저 스캐너 또는 전자식 주사 기능을 가진 고체 소자 배열로 스캔될 예정이다. 스캔 신호는 통신위성으로 송신된 뒤 지상국으로 전달된다. 퍼킨엘머는 단일 통신위성으로 11.5메가헤르츠의 비디오 대역폭을 사용하여 모든 필름을 전송할 수 있다고 보았다. 지상으로의 직접 송신도 검토되었다.
퍼킨엘머의 제안에는 필름 특성, 필름 취급 및 현상 절차·처리 시간, 스캐닝 및 판독 작업·시간 등 세부 내용이 부족했다. 제안된 시스템의 실제 운용능력에 대한 설명도 없었다. 퍼킨엘머는 위성이 궤도당 38분(하루 6궤도)만 전송할 수 있어, 각 패스당 약 12피트(3.7미터)의 필름만 전송 가능하다고 추정했다.
비식별 처리된 한 NRO 관계자는 이 제안을 “유망성이 커 보이는 매력적인 개념”이라고 언급했다. 그는 이 주제를 “추진하고 보다 만족스러운 기계화 방식을 찾는 시도를 해야 한다”고 보았다. 그는 덧붙였다. “고체 소자 배열 스캐닝이 전체 해상도, 설계 단순성, 운용 신뢰성과 유연성에서 훨씬 가장 유망하다. 레이저 스캐너를 사용할 경우 데이터율은 분당 약 50,000라인의 스캔 속도에 의해 제한된다. 이 응용에서 고체 소자 배열의 데이터율은 사실상 제한이 없다.”
HEXAGON NASA 루나 오비터 우주선의 필름 스캐닝 시스템. 현재 뉴욕 로체스터의 조지 이스트먼 박물관에 있다. 노광·현상된 필름은 이 장치로 스캔되었고, 필름의 명암은 전자 신호로 변환되어 지구로 전송된 뒤 다시 이미지로 변환되었다. 유사한 시스템이 HEXAGON 위성의 준실시간 정찰 버전에 사용되었을 수도 있다. (출처: 드웨인 데이)
FROG와 KENNEN 준실시간 위성 정찰 능력을 개발할지에 대한 논쟁은 1970년 내내 격화되었다. 전자광학 영상(EOI) 기술은 발전 중이었지만 아직 미성숙했다. 반면, 필름 판독 기술은 이미 우주에서 입증된 바 있었다. FROG는 검증된 GAMBIT-3 카메라 시스템에 의존할 예정이었다. 노광된 필름을 수집하는 두 개의 재진입체 대신, FROG는 두 개의 필름 공급부와 스캐닝 시스템을 수용하는 대형 전방부를 가진다. 필름은 카메라를 통해 공급되어 노광된 뒤, 기내에서 현상되고 코닥이 “바이매트(bimat)”라 부른 공정을 통해 스캔될 예정이었다. 이 공정은 이미 NASA의 루나 오비터 프로그램에서 입증되었다. 한 필름 공급부가 소진되면 다른 시스템을 사용한다(“FROG: The Film Read Out GAMBIT program,” The Space Review, 2022년 2월 7일 참조). 유인궤도실험실(MOL) 프로그램(1969년 여름 취소)에서도 필름 스캐닝 시스템이 제안된 바 있었다(“Live, from orbit: the Manned Orbiting Laboratory’s top-secret film-readout system,” The Space Review, 2023년 9월 18일 참조).
필요한 기술 대부분은 이미 존재했지만, FROG 같은 크고 복잡한 시스템으로 통합되지는 않았다. 아마도 퍼킨엘머의 HEXAGON 제안도 FROG와 유사했을 것이다. 현상 시스템은 아마 카메라 위·전방에 설치되었겠지만, 서로 다른 필름을 주 임무용 기존 필름에 어떻게 접합할지는 불분명하다.
HEXAGON 준실시간 제안의 시점은 우연이 아니었다. NRO 관계자가 이 개념을 NRO 수장에게 보고한 같은 달, NRO 집행위원회에서는 “CORONA Six-Pack,” “PINTO,” “AXUMITE,” “FASTBACK,” “SPIN-SCAN” 등의 이름을 가진 여러 “위기 대응 위성(crisis response satellites)”에 대해 논의가 있었다. 이들 중 어느 것도 채택되지 않았다(“National Reconnaissance Program crisis photography concepts, part 1: A six-pack of Corona”, The Space Review, 2022년 5월 31일; “National Reconnaissance Program crisis photography concepts, part 2: PINTO,” 2024년 2월 6일; “National Reconnaissance Program crisis photography concepts, part 3: Axumite,” The Space Review, 2024년 6월 10일; “National Reconnaissance Program crisis photography concepts, part 4: FASTBACK and FASTBACK-B,” The Space Review, 2024년 11월 25일; “Spinning towards the future: crisis response from space,” The Space Review, 2023년 7월 3일; “Crisis in space: the 1973 Yom Kippur War and ‘crisis reconnaissance,’” The Space Review, 2023년 10월 2일 참조).
FROG 또는 EOI를 개발 승인할지에 대한 논쟁은 1971년 봄 몇 달 뒤 정점에 달했다. 고위 정보 관계자들은 단기간 내 해결책으로 FROG를 추구하기로 결정했는데, 이는 2~3년 내 실전 배치를 염두에 둔 것이었고, EOI는 1976~1977년경 이용 가능한 장기 해법으로 추진하기로 했다. 그러나 그해 후반 그 결정은 뒤집혀 FROG는 취소되고, EOI 시스템은 곧 KH-11 KENNEN으로 명명되어 추진되었으며 1976년 말 발사되었다.
HEXAGON 1970년대 중반, 국가정찰국은 HEXAGON 위성의 준실시간 정찰 능력을 연구하는 프로그램을 운영했다. 이름은 “RED SHIRT”였고, 아마 스타 트렉에서 따온 듯하다. 넌지시 묻자면: 이 네 명 중 누가 안전하게 엔터프라이즈로 돌아갔을까? (출처: 파라마운트)
RED SHIRT NRO가 퍼킨엘머의 HEXAGON 준실시간 기능 추가 연구를 승인했다는 징후는 없다. 그것은 1971년의 FROG와 KENNEN이 추구하던 바에 비해 이상적이지도, NRO가 찾던 바도 아니었다. 그 하나의 장점이라면 FROG나 KENNEN보다 훨씬 넓은 촬영 범위를 제공한다는 점이었다.
Alesi는 S-큐브드의 기원이 퍼킨엘머 경영진의 제품 확대 욕구에서 시작되었다고 설명했다. “우리는 스타 트래커 사업에 진입하려고 했어요.”라고 그는 회상했다. 1976년에 비밀해제된 문건은 이 주제가 RED SHIRT라는 프로그램 형태로 살아 있었음을 보여준다. RED SHIRT는 HEXAGON을 위한 “준실시간 필름 판독 장치”로 묘사되었다. 이는 1970년대 후반 발사 예정이었으나 결국 1980년대로 미뤄진 블록 IV HEXAGON 위성의 선택지로는 간주되지 않았다. NRO 내부 메모는 RED SHIRT를 추진하는 어느 결정이든 우주왕복선 발사와 호환되어야 하며, 동시에 KENNEN 업그레이드 비용과 비교 평가되어야 한다고 지적했다.
RED SHIRT라는 이름의 유래는 알려지지 않았다. 다만, 이후 제안된 우주 시스템 중 DAMON이라는 이름이 있었는데, 이는 “Nomad”를 거꾸로 쓴 것으로 보인다. Nomad는 스타 트렉의 한 에피소드에 등장하는 우주선이었고, RED SHIRT는 TV 시리즈의 expendable(소모용) 보안요원을 가리키는 표현을 참조했을 가능성이 있다.
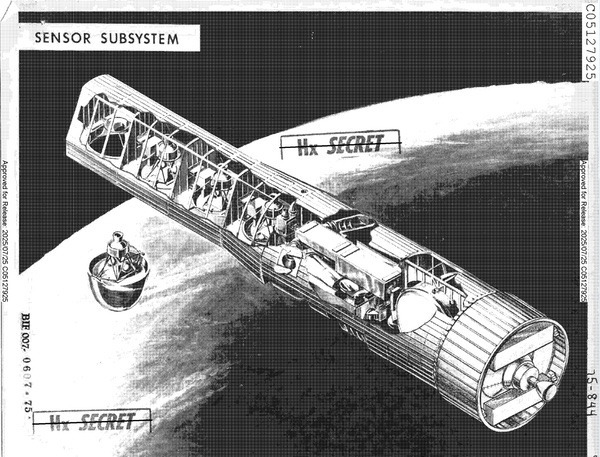
HEXAGON HEXAGON HEXAGON 정찰 위성 내부. 두 개의 주 카메라와, 위성의 위치를 결정하기 위해 별 영상을 촬영하기 위해 위를 향해 뒤쪽으로 설치된 두 개의 S-큐브드 카메라가 보인다. HEXAGON은 주 카메라의 필름을 재진입체로 회수했다. (출처: NRO)
HEXAGON 발사와 S-큐브드 첫 HEXAGON 발사는 1971년 6월 15일에 이루어졌다. 임무는 성공적이었고, 1972년에 네 번째까지, 1973년에 다시 네 번째까지 이어졌다. 1974년에 두 번, 1975년에 다시 두 번 발사되었다. 그 뒤 발사 속도는 연 1회로 줄었다. 1973년 다섯 번째 HEXAGON부터는 전방부에 지도제작 카메라가 추가되었고, 자체 필름 회수체와 함께 1980년 발사된 16번째 기체까지 운용되었다. 1982년에 발사된 17번째 HEXAGON은 지도제작 카메라를 제거하고, 주 카메라를 지도제작 목적으로 사용했다. 이는 새로운 기술 덕분이었다(“Above Top Secret: the last flight of the Big Bird,” The Space Review, 2019년 2월 18일 참조).
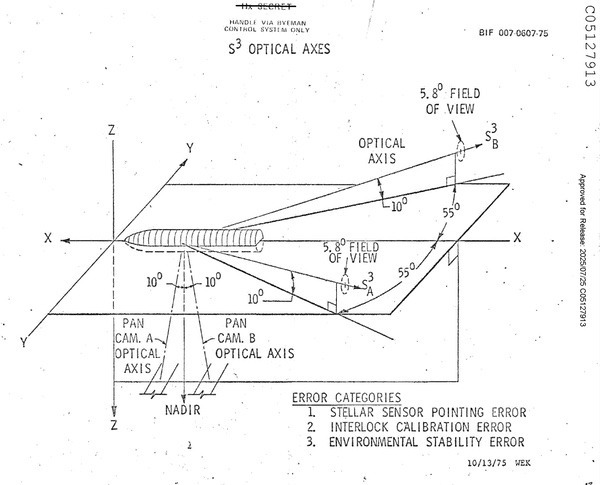
지도제작 카메라의 주요 요구 중 하나는 사진 속 지형의 위치를 정확히 기록하여 대규모 지도를 만들기 위해 사진을 이어 붙일 수 있게 하는 것이다. HEXAGON의 주 카메라가 지도제작에 사용되지 못하게 했던 요소 중 하나는 각 이미지의 위치 데이터가 정밀하지 않았다는 점이었다. 위성에는 별 영상 카메라가 있어 주기적으로 별을 촬영했고, 이는 알려진 성도와 비교되어 우주선의 정확한 지향을 산출했다. 그러나 이 카메라는 주기적으로만 작동했고, 성표시기 고정 사이 구간에서는 자이로 데이터를 사용해 지구 상대 우주선 운동을 보정했다. 1970년대 중반, HEXAGON의 강력한 이중 카메라 시스템을 설계한 퍼킨엘머의 엔지니어들은 주 카메라가 어디를 가리키는지 훨씬 더 정밀한 데이터를 제공하는 방법을 고안했다. 그들은 우주선에 S3 또는 “S-큐브드”로 알려진 새로운 카메라 시스템, 즉 Stellar Solid State를 추가함으로써 이를 구현했다.
HEXAGON 두 개의 S-큐브드 카메라는 지구를 내려다보던 정찰 카메라와 달리 위쪽을 향했다. 이들은 시스템의 위치 보고 능력을 개선하여, 전용 지도제작 카메라를 제거하고 주 카메라를 지도제작 목적으로 사용할 수 있게 했다. (출처: NRO)
톰 알레시는 1960년대 중반 HEXAGON 프로그램 초창기부터 퍼킨엘머에 있던 엔지니어였다. “건물도 갖추기 전에 시작했죠.”라고 그는 회상했다. 1970년대 주 카메라 시스템 개발과 비행 전반에 걸쳐 그는 HEXAGON 개선과 시험 등 여러 프로젝트에서 일했다.
알레시는 S-큐브드의 기원이 퍼킨엘머 경영진의 제품 확대 욕구였다고 설명했다. “우리는 스타 트래커 사업에 진입하려고 했어요.”라고 그는 회상했다. 그들은 이 분야의 선도 기업이던 볼 에어로스페이스와 경쟁하길 원했다. 그 동기 중 하나는 아직 발사되지 않았던 허블 우주망원경의 스타 트래커가 많은 전력을 소모한다는 사실을 알게 되었기 때문이었고, 그들은 전력 소모가 적은 대안을 만들고자 했다. 그러나 1980년대 초까지 여러 S-큐브드 스타 트래커를 개발·비행한 뒤에도 판매에는 어려움을 겪었다. 고객들은 스타 트래커가 비행 경험이 있는지 알고 싶어 했지만, 이를 사용한 HEXAGON 임무는 기밀이었기 때문이다.
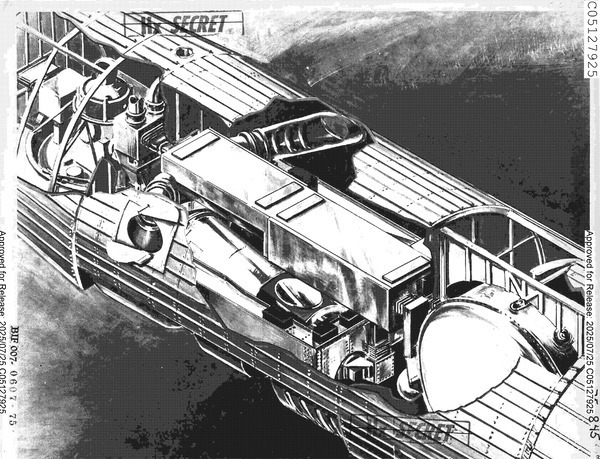
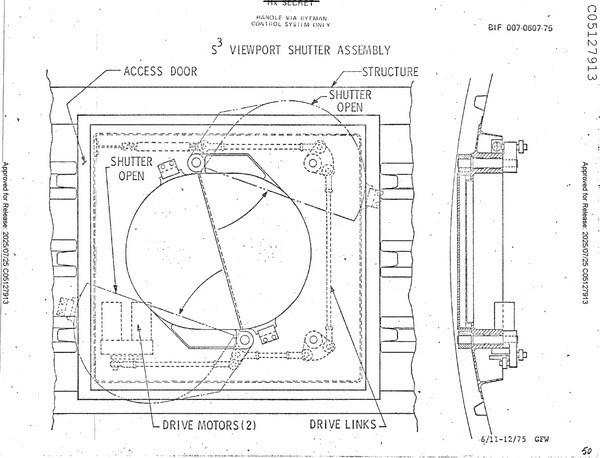
HEXAGON 뷰포트 셔터 어셈블리는 각 S-큐브드 카메라가 위성 위쪽 하늘을 볼 수 있도록 개방되었다. (출처: NRO)
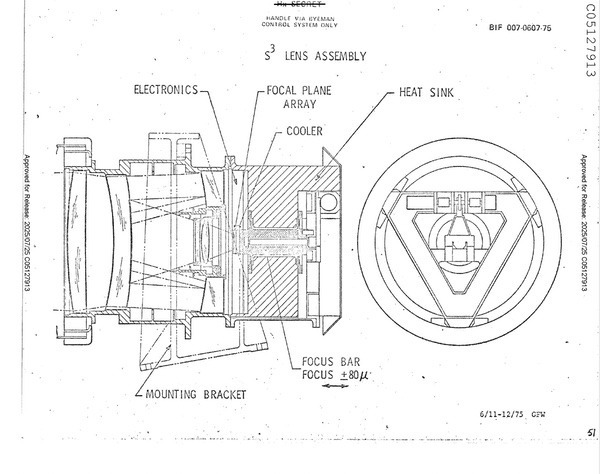
S-큐브드는 전하결합소자(CCD)를 사용하는 두 대의 카메라로 구성되었다. CCD는 빛을 직접 전자 신호로 바꾼다. 이는 약 10년 전 벨 연구소에서 발명되었고, 아마도 CIA의 일부 자금 지원을 받았을 가능성이 있다. CCD 배열은 1976년 처음 발사된 KH-11 KENNEN 정찰위성의 영상 취득 센서의 기반이 되었고, 퍼킨엘머의 엔지니어들은 이 기술을 HEXAGON에 지원 역할로 도입하고자 했다. S-큐브드 시스템이 할 수 있었던 것은 연속적인 성표시기 고정을 기록하는 것으로, 우주선은 덜 정확한 자이로 정보에 의존할 필요가 없어졌다. 그 결과 주 카메라를 지도제작에 사용할 수 있었고, 우주선 전방의 추가 지도제작 카메라는 제거되었다. 다른 변화로는 필름 탑재량이 증가했고, 더 많은 필름을 사용할 수 있게 되었다.
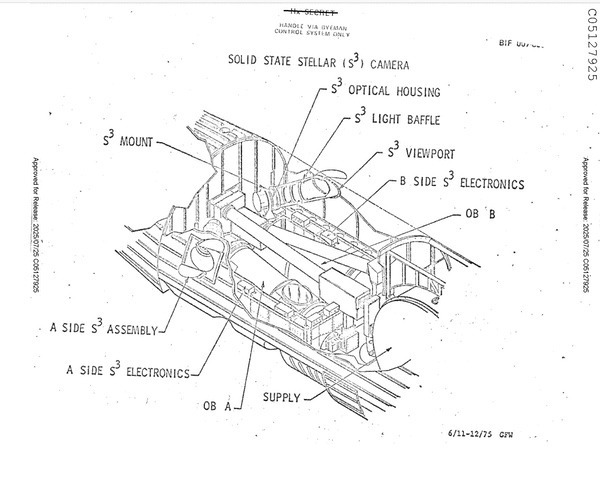
HEXAGON 퍼킨엘머는 성표시기 카메라 제작 사업에 진입하기 위해 S-큐브드, 즉 Solid State Stellar 카메라를 시작했다. HEXAGON 임무가 기밀이었기 때문에 회사는 이를 마케팅하는 데 어려움을 겪었다. (출처: NRO)
한 전직 NRO 관계자는 S-큐브드 카메라가 어떻게 작동했는지 설명했다. “두 대의 일반적인 S3 카메라는 전방의 투 카메라 어셈블리(TCA) 좌현과 우현 측면에 닫을 수 있는 도어 뒤쪽, 중간 구조물에 장착되었고, 위성과 뒤쪽을 향해 위를 보면서 우주선이 궤도를 따라 움직일 때 CCD 선형 배열을 가로지르는 별의 횡단을 포착했습니다. 데이터는 우주선의 텔레메트리 테이프 레코더에 기록되어 지상으로 재생되었고, 이후 별 중심(star centroid) 처리를 거쳤습니다.” 카메라는 HEXAGON의 두 주 카메라를 지지하는 프레임에 직접 장착되었고, 그 결과 이들과의 각도 관계가 정밀하게 알려져 있었다.
HEXAGON 주 카메라 시스템 설계자 중 한 명인 필 프레셀의 『Meeting the Challenge』에 따르면, 카메라 전자장치는 별 데이터의 처리, 저장, 전송을 제공했다. 또한 두 대의 S-큐브드 카메라의 냉각기를 제어하고, 초점면 전자장치에 전력을 공급하며, 명령 인터페이스를 제공하는 열·전력 제어 박스가 있었다.
HEXAGON 두 대의 S-큐브드 카메라는 위성과 후방을 바라보았다. 18호기와 19호기 임무에서는, 야간에 지상 열원을 탐지하기 위해 위성 하나의 카메라가 지면을 보도록 위성을 뒤집고 회전시켰다. 20호기에서는 예비 카메라를 하향으로 장착하여 우주선의 자세를 바꿀 필요가 없었다. 계획은 이 특수 카메라를 사용해 소련의 야간 영상을 제공하기 위해 위성을 일반 HEXAGON 임무보다 훨씬 더 오래 비행시키는 것이었다. (출처: NRO)
1982년에 발사된 17번째 HEXAGON 임무(1217호기)는 S-큐브드 카메라 시스템을 우주로 실어 나렸고 제대로 작동했다. 1983년에 발사된 1218호기 임무에서 위성 관제사들은 새로운 일을 시도하기로 했다. 전직 NRO 관계자는 설명한다. “CCD에는 제한적이지만 적외선(IR) 능력도 있었는데, 이전 기체들에서는 정상 임무 종료 시 야간 북상 국부 시간 패스에서 지상을 촬영하는 실험에 사용되었고, 이때 버스 크기의 우주선을 궤도에서 등을 대는 자세로 뒤집고 한쪽으로 롤시켜 활동을 시사할 수 있는 대형 IR 신호를 탐색했습니다. 북상(야간) 구간 동안에는 차가운 지구 배경과 대비되어 IR 활동 신호의 대비가 주간 고온 지구 배경보다 더 컸습니다.”
별을 촬영하던 카메라로 지상을 보려면 우주선을 뒤집는 큰 기동이 필요했는데, 이는 궤도상에서 버스 크기의 우주선을 앞뒤로 전환하는 것이었다. 이는 일부 자세제어계(RCS) 가스를 소모했다. 주 카메라가 우주 공간을 향한 자세로 고정될 위험이 있었기 때문에, 관제사들은 임무 말기에만 이 회전 기동을 수행했다.
1984년에 발사된 19번째 HEXAGON도 S-큐브드 카메라 시스템을 탑재했고, 시험 중에도 성공적이었다. 안타깝게도 그 우주선은 제어 문제를 겪었고, 지상 관제사는 임무를 조기 종료하기로 했다. 그들은 필름을 처음 세 개의 재진입체에 모두 싣고, 위성이 필름을 실은 채 궤도에서 사망할 가능성에 대비해 평소보다 더 빨리 내려보냈다.
18호기와 19호기가 소련 상공 야간 비행 중 S-큐브드 센서로 정확히 무엇을 보았는지는 아직 기밀이다. “그들은 러시아인들이 우리가 볼 수 없는 밤에 뭔가를 하고 있다는 걸 알고 있었죠.”라고 알레시는 설명했다. 정보 관계자들은 오랫동안 소련의 “은폐와 기만(denial and deception)” 활동, 즉 때로는 야간에 활동을 수행함으로써 활동을 숨기려는 노력에 우려를 가져왔다.
HEXAGON HEXAGON 1986년 4월, 마지막 HEXAGON 위성이 캘리포니아 밴덴버그 공군기지에서 발사되었다. 타이탄 로켓은 발사대 상공에서 폭발하여, 기밀 위성과 특별한 S-큐브드 카메라를 포함한 파편을 주변 지역에 비처럼 떨어뜨렸다. 대부분의 파편은 회수되었지만, 타이탄의 일부 조각은 여전히 주변 지역에 남아 있다.
마지막 HEXAGON의 비행 소련 내부의 적외선원을 탐지할 수 있는 새로운 카메라 시험이 성공하자, NRO는 마지막 HEXAGON 비행에 새로운 임무를 추가했다. 위성을 적외선 탐지 플랫폼으로 운용하는 것이었다. 전직 NRO 관계자에 따르면 “실험에서 어느 정도 성공이 있었기 때문에, 20호기에는 예비 S3 카메라가 추가되어 하향으로 장착되었고, 그 결과 남상에서 북상으로, 다시 45분마다 남상으로 넘어갈 때마다 소중한 RCS 가스를 낭비하며 우주선을 뒤집고 롤할 필요가 없었습니다.”라고 설명했다. “또한 이전 기체의 시험처럼 주 임무가 끝날 때까지 기다리지 않고, 주 임무 동안 야간 IR 임무를 수행할 수 있게 해주었습니다.”
이 새로운 센서 덕분에, 마지막 HEXAGON 임무는 주 임무 동안 적외선 관측을 수행할 수 있을 뿐 아니라, 주 임무가 끝난 후에도 오랫동안 계속 운용할 수 있게 되었다. 톰 알레시는 추가 S-큐브드 카메라를 우주선에 추가하는 일을 총괄했다. 이 프로젝트에 특별한 명칭이나 프로그램 번호는 없었다. 사실, 알레시에 따르면 퍼킨엘머에서는 HEXAGON 프로젝트를 단지 “프로그램 1” 또는 “P1”이라고만 불렀다. “HEXAGON이나 KH-9라는 말은 금기였죠.”라고 그는 회상했다. “항상 P-1이었어요.” 그들은 구성요소 모두에 약칭을 썼다. 필름을 평평하게 고정해 빛에 노출시키는 필름 플래튼은 “PL,” 필름을 루핑하는 장치는 “LO”라고 불렀다. 어느 순간부터는 카메라 시스템 부품의 실제 명칭을 기억하기 어려워질 정도였다. 필 프레셀은 퍼킨엘머에서 고객—초기에는 CIA, 이후에는 국가정찰국의 미 공군 구성요소—의 이름을 누구도 언급하지 않았다고 기억한다. 그들은 항상 “고객”이라고만 불렀다. 이 모든 것은 보안을 위한 것이었다.
알레시는 특수 S-큐브드 카메라 시스템의 공학을 해결해야 했다. “그것은 필름 공급부와 투 카메라 어셈블리 사이 영역에 장착되었습니다.”라고 그는 회상했다. 카메라가 지구를 내려다볼 수 있도록 우주선에 구멍을 냈다. 그들은 슈워츠 인더스트리즈에 카메라를 고정할 프레임 제작을 의뢰했고, 약 1미터 정사각형의 대형 알루미늄 블록을 깎아 만들었다. 알레시는 설계를 제출할 때마다 더 튼튼하게 만들라는 지시가 돌아왔고, 그 결과 프레임은 점점 두꺼워졌다고 기억한다.
이 새로운 센서 덕분에, 마지막 HEXAGON 임무는 주 임무가 끝난 뒤에도 오랫동안 계속 운용할 수 있게 되었다. 위성은 반응 제어 추진제 연료가 바닥날 때까지 지구를 선회하면서 소련의 적외선 영상을 촬영할 수 있었다. 임무 보고서에 따르면, 주 카메라를 포함하는 주 임무는 300일로 일정이 잡혔는데, 이는 이전의 어떤 HEXAGON 임무보다 길었다. 그 다음 위성은 추가로 240일간 “단독” 임무를 계속 수행하며 적외선 S-큐브드 카메라를 운용할 예정이었다. 즉, 궤도에서 1년 반, 가장 긴 HEXAGON 임무의 두 배였다.
1980년대에 들어서면서 NRO는 소련의 적외선 관측에 점점 더 관심을 갖게 되었고, 어느 시점에서 KH-11 위성에 DRAGON이라는 새로운 적외선 관측 능력이 추가되었다. DRAGON을 알고 있던 전 CIA 분석관에 따르면, 이는 KENNEN에 실질적인 개선을 가져왔으며, S-큐브드 카메라보다 훨씬 더 능력이 컸을 가능성이 높다. 이는 더 장파장의 적외선을 볼 수 있어, DRAGON이 더 차가운 적외선 표적도 볼 수 있었기 때문이다.
마지막 HEXAGON 발사는 많은 것을 걸고 있었다. “20호기는 마지막이었기 때문에 가능한 모든 것을 우겨 넣었고, 새로운 데이터나 기회가 오랫동안—or 어쩌면 다시는—없을 수 있는 수집 요구와 자위성 임무가 있음을 알았기 때문입니다.”라고 전직 NRO 관계자는 설명했다.
1986년 4월 20일, 마지막 HEXAGON을 실은 타이탄 34D 로켓은 발사대를 떠올랐다가 산산조각이 나면서 파편을 발사대와 주변 지역에 쏟아냈고, 작은 산불을 일으켰으며 발사대 근처에 주차된 건물과 차량 일부를 손상시켰다. 이는 많은 사람들이 평생을 바친 프로그램의 비참한 결말이었다.
조사 결과, 고체 부스터 중 하나의 내부 단열재가 이탈하여 배기가스가 누출·케이싱을 태워 급속한 폭발로 이어졌음이 드러났다. 알레시는 코네티컷주 댄버리에 있는 퍼킨엘머 시설로 돌아간 뒤, 기밀 파편을 수거하는 지난한 과정에 관여했던 누군가와 나중에 이야기를 나눴다. 그 사람은 추가 S-큐브드 카메라를 지지하던 견고한 알루미늄 프레임을 발견했다고 말했다. 그것은 여전히 멀쩡했다. 확실히 충분히 튼튼했던 것이다.
주석 [이름 비공개] 맥루커스 박사에게 보내는 메모랜덤, “HEXAGON Near-Real-Time Readout,” 1971년 1월 21일.
드웨인 데이: zirconic1@cox.net
주: 현재 댓글은 검토 후 게재됩니다. 게재까지 지연이 있을 수 있으며, 모든 댓글의 게시를 보장하지 않습니다.
The Space Review: Live, it’s the Big Bird! The HEXAGON satellite and near-real-time reconnaissance

 |
Live, it’s the Big Bird! The HEXAGON satellite and near-real-time reconnaissanceby Dwayne A. Day
Monday, November 3, 2025
In late 1970, the Perkin-Elmer Corporation made a rather bold proposal to modify the HEXAGON film reconnaissance satellite to enable it to conduct near-real-time reconnaissance. It was unusual because HEXAGON had not yet launched and was behind schedule after suffering a series of delays and cost overruns in the previous several years. But the company was responding to an ongoing discussion within the intelligence community about the need for more timely satellite imagery. Perkin-Elmer’s proposal was not accepted at the time, but a decade later, the company included such a capability in its satellites.
 |
Background of HEXAGON
The HEXAGON program began in the mid-1960s as a replacement for the CORONA area search satellite. The goal of HEXAGON was to photograph large areas of the Soviet Union at resolution sufficient to identify Soviet weapons systems and differentiate them: for instance, identifying a tank versus an armored personnel carrier. HEXAGON was designed and built by the Perkin-Elmer Corporation of Danbury, Connecticut. It was originally planned to launch in 1970, but due to technical problems, it was delayed by a year.
| They were spurred on at least in part by the experience during the Soviet invasion of Czechoslovakia, when Soviet invasion forces were photographed by an American reconnaissance satellite, but the film was not seen until after the invasion had occurred. |
HEXAGON had two powerful cameras that spun in opposite directions, exposing long lengths of film. The film ran from large supply reels at the rear of the spacecraft, through the cameras, and forward into the four reentry vehicles. When a reentry vehicle was full, the film was cut, and the vehicle was sealed and ejected. It reentered Earth’s atmosphere and was recovered. The film was transported to Eastman Kodak in Rochester, New York, where it was developed and copied and sent to Washington, DC for analysis. It could be a few days to several weeks from when a photo was taken to when it was seen. It was not timely, but each HEXAGON mission would cover so much area at such good resolution that it would return a huge amount of intelligence data in a relatively short period of time.
The CORONA, GAMBIT and HEXAGON film-return systems provided “strategic reconnaissance,” meaning assessments of the numbers and types of Soviet weapons systems. They were not intended to provide indications and warning of potential attack. But throughout the 1960s the National Reconnaissance Office (NRO), which managed the satellite intelligence programs, evaluated other potential systems for providing photographic intelligence faster. They were spurred on at least in part by the experience during the Soviet invasion of Czechoslovakia, when Soviet invasion forces were photographed by an American reconnaissance satellite, but the film was not seen until after the invasion had occurred.
By early 1970, there were two concepts being considered for “near-real-time” reconnaissance, which was generally understood to mean that photos would be available for viewing within an hour. These two concepts were the electro-optical imaging (EOI) approach, and the Film Read Out GAMBIT, or FROG.
 |
Near-real-time for HEXAGON
In late 1970, Perkin-Elmer (P-E) proposed to officials at the NRO to add a near-real-time capability to the HEXAGON satellite. Perkin-Elmer had not yet conducted a detailed study but was proposing that they be authorized and funded to perform one. P-E at the time had no system description for this concept. They only suggested possible techniques and components and had not done a full evaluation of them. The company not only needed authorization and money to conduct a study but also needed better guidance from the government on what such a system should do.
The proposed configuration would have a total lifetime of 135 days. After 45 days of the primary HEXAGON mission at an altitude of 80 nautical miles (148 kilometers), the satellite would then be boosted to 124 nautical miles (230 kilometers) to provide another 90 days of near-real-time operation. Four HEXAGON launches per year lasting 145 days would provide a continuous near-real-time capability in orbit. One satellite would be performing the primary HEXAGON mission while the other would be performing the near-real-time mission.
The satellite would have additional fuel to not only boost it to the higher orbit, but to make up for drag during the extended mission. The mass for that fuel and the near-real-time equipment would be obtained by deleting some of the secondary payloads and subsatellites. HEXAGON was then planned to carry a satellite into orbit mounted to its forward section. That satellite, designed for signals intelligence, would be deployed in orbit and then use its own rocket motor to boost it to a higher orbit. Deleting it and its handling system would save several hundred kilograms. It is not clear what other secondary payloads P-E proposed eliminating, although HEXAGON flew with several different secondary payloads over its 20 missions, all mounted to or deployed from the forward section of the bus-sized satellite.
| An NRO official whose identity is deleted from a declassified document referred to the proposal as “an appealing concept which appears to hold much promise.” |
The near-real-time “module” would be composed of a separate film supply and take-up for the film, a near-real-time film looper, an on-board film developer and scanner, and the data transmission system. The module would have up to 13,000 feet (3,960 meters) of film. The developing and fixing process would require only radiation and heat. The near-real-time film would be spliced on to the end of the primary film at the end of the 45-day primary mission. It would use one of the two cameras, providing only monoscopic imagery, whereas the two cameras enabled stereoscopic imagery of targets that could be used to calculate the height of objects on the ground.
The processed film would be scanned with a laser scanner or a solid-state array with electronic scanning. The scanning signal would be transmitted to a communications satellite and then to a ground station. Perkin-Elmer believed that a single comsat would enable all the film to be transmitted using a video bandwidth of 11.5 megahertz. The company also considered direct transmission to the ground.
The Perkin-Elmer proposal lacked detail, including film characteristics, the film handling and developing procedures and processing time, and the scanning and read-out operations and times. There was no description of the practical operational capability of the proposed system. Perkin-Elmer estimated that the satellite could only transmit for 38 minutes per orbit (six orbits per day), allowing approximately 12 feet (3.7 meters) of film to be transmitted during each pass.
An NRO official whose identity is deleted from a declassified document referred to the proposal as “an appealing concept which appears to hold much promise.” The official believed the subject should be pursued “and an attempt be made to find a more satisfactory mechanization.” He added, “Solid state array scanning is by far the most promising, offering better overall resolution, design simplicity, and operational reliability and flexibility. The data rate using a laser scanner is limited by a scanning rate of about 50,000 lines/minutes. Data rate with solid state arrays is essentially unlimited in this application.”
 |
FROG and KENNEN
The debate over developing a near-real-time satellite reconnaissance capability heated up throughout 1970. Electro-optical imaging (EOI) technology was improving but was still immature. On the other hand, film-readout technology had already been flown in space. FROG would rely upon the proven GAMBIT-3 camera system. Instead of two reentry vehicles to collect the exposed film, FROG would have a large forebody that housed two film supplies and scanning systems. Film would be fed through the camera and exposed, then it would be developed onboard and scanned using a process that Kodak referred to as “bimat” and already proven on NASA’s Lunar Orbiter program. When one film supply ran out, the other system would be used (see “FROG: The Film Read Out GAMBIT program,” The Space Review, February 7, 2022.) A film-scanning system had also been proposed for the Manned Orbiting Laboratory (MOL) program, canceled in summer 1969 (see “Live, from orbit: the Manned Orbiting Laboratory’s top-secret film-readout system,” The Space Review, September 18, 2023.)
Most of the technology required already existed, although it had not been incorporated into a large and complex system like FROG. Presumably, Perkin-Elmer’s proposal for HEXAGON would have been similar to FROG. The developing system probably would have been mounted above and forward of the cameras, although how the different film would be spliced onto the existing film for the primary mission is unclear.
The timing of the HEXAGON near-real-time proposal was not coincidental. The same month that the NRO official brought the concept to the attention of the head of the NRO, there was a discussion within the NRO’s Executive Committee about several possible “crisis response satellites” with names like “CORONA Six-Pack,” “PINTO,” “AXUMITE,” “FASTBACK,” and “SPIN-SCAN.” None of these were accepted. (See “National Reconnaissance Program crisis photography concepts, part 1: A six-pack of Corona”, The Space Review, May 31, 2022; “National Reconnaissance Program crisis photography concepts, part 2: PINTO,” February 6, 2024; “National Reconnaissance Program crisis photography concepts, part 3: Axumite,” The Space Review, June 10, 2024; “National Reconnaissance Program crisis photography concepts, part 4: FASTBACK and FASTBACK-B,” The Space Review, November 25, 2024; “Spinning towards the future: crisis response from space,” The Space Review, July 3, 2023; “Crisis in space: the 1973 Yom Kippur War and ‘crisis reconnaissance,’” The Space Review, October 2, 2023.)
The debate over whether to approve FROG or EOI for development came to a head a few months later in spring 1971 when senior intelligence officials decided to pursue FROG as the near-term solution, able to be fielded within a couple of years, and EOI as a longer-term solution, available around 1976 or 1977. Later in the year, that decision was reversed, FROG was canceled, and the EOI system, soon named the KH-11 KENNEN, was pursued and eventually launched in late 1976.
 |
RED SHIRT
There is no indication that the NRO approved a study by Perkin-Elmer of adding a near-real-time capability to HEXAGON. It would not have been ideal or what the NRO was seeking by 1971 with FROG and KENNEN. The one advantage it would have had was providing a much broader imaging area than either of those systems.
| Alesi explained that the origin of the S-Cubed was the desire by Perkin-Elmer’s leadership to expand their products. “We were trying to get into the star-tracker business,” he recalled. |
A recently declassified document from 1976 indicates that the subject remained alive in the form of a program named RED SHIRT. RED SHIRT was described as “a near-realtime film readout device” for HEXAGON. It was not considered an option for the block IV HEXAGON satellites, which were scheduled for launch in the late 1970s, but eventually slipped into the 1980s. An internal NRO memo noted that any decision to pursue RED SHIRT should be compatible with launch on the Space Shuttle but would also have to be evaluated against the costs of upgrades to the KENNEN.
The origin of the name RED SHIRT is unknown. However, later a proposed space system was named DAMON, an apparent reference to “Nomad” spelled backwards. Nomad was a spacecraft featured in an episode of Star Trek, and RED SHIRT may have been a reference to the expendable security guards of the TV series.
  |
HEXAGON launches and the S-Cubed
The first HEXAGON launch took place on June 15, 1971. The mission was successful and was followed by three more in 1972 and again in 1973, two more in 1974 and again in 1975. After that the launch rate dropped to one per year. Starting with the fifth HEXAGON in 1973, a mapping camera was added to its nose along with its own film-return vehicle, and these payloads flew on HEXAGON until the 16th vehicle launched in 1980. The 17th HEXAGON, launched in 1982, eliminated the mapping camera and used the main cameras for mapping purposes, something made possible by a new technology (see “Above Top Secret: the last flight of the Big Bird,” The Space Review, February 18, 2019.)
One of the primary requirements for a mapping camera is to precisely record the position of the terrain in the photographs so that the photos can be stitched together to form large scale maps. One of the things that prevented the HEXAGON’s main cameras from being used for mapping was that the location data for each image was not precise. The satellite had stellar indexing cameras that periodically took photos of stars that could be compared to known star maps to determine the exact pointing of the spacecraft. But these cameras only operated periodically, and during the intervals between stellar index camera fixes, gyro data was used to correct for spacecraft motion relative to the Earth. By the mid-1970s, engineers at Perkin-Elmer Corporation, who had designed the HEXAGON’s powerful dual camera system, came up with a way of providing much more precise data about where the HEXAGON’s main cameras were pointing. They did this by adding a new camera system to the spacecraft known as the Stellar Solid State: the S3 or “S-Cubed” camera.
 |
Tom Alesi was an engineer who had been at Perkin-Elmer since the beginning of the HEXAGON program in the mid-1960s. “I started before we even had a building,” he recalled. Throughout the development of the main camera system and then the flights in the 1970s he worked on various projects associated with improving HEXAGON, making it better and doing other tests.
Alesi explained that the origin of the S-Cubed was the desire by Perkin-Elmer’s leadership to expand their products. “We were trying to get into the star-tracker business,” he recalled. They wanted to compete with Ball Aerospace, which was a leader in the business. One of their incentives was that they discovered that the Hubble Space Telescope, which had not been launched yet, had star trackers that used a lot of power, and they wanted to come up with an alternative that was less energy hungry. Once they had developed and flown several of the S-Cubed star trackers by the early 1980s, however, they found that they had a hard time selling them. Customers wanted to know if the star trackers had flight experience, but the HEXAGON missions that had used them were classified.
 |
The S-Cubed consisted of two cameras that used charge-coupled devices, or CCDs. CCDs turned light directly into electronic impulses. They had been invented about a decade earlier by Bell Laboratories, probably with at least some CIA funding. A CCD array formed the basis of the image capturing sensor inside the KH-11 KENNEN reconnaissance satellites first launched in 1976, and Perkin-Elmer’s engineers had sought to add this technology to the HEXAGON in a supporting role. What the S-Cubed system could do was record continuous stellar fixes, meaning that the spacecraft did not need to rely on the less accurate gyroscope information. That enabled the main cameras to be used for mapping purposes and the extra mapping camera on the spacecraft’s nose was eliminated. Other changes increased the film load and enabled more of the film to be used.
 |
A former NRO official explained how the S-Cubed cameras worked: “The two normal S3 cameras were mounted on the port and starboard sides on the front of the Two Camera Assembly (TCA) behind closeable doors in the mid-section structure and looked up, out, and back of the vehicle to capture star transits across the CCD linear arrays as the vehicle moved through its orbit. The data was recorded on the vehicle telemetry tape recorders for playback to the ground and subsequent star centroid processing.” The cameras were mounted directly to the frame that also held the HEXAGON’s two main cameras, which meant that their angular relationship to those cameras was precisely known.
According to Meeting the Challenge, a book by Phil Pressel, one of the designers of the HEXAGON’s main camera system, the electronics for the cameras provided processing, storage, and transmission of the star data. There was also a thermal and power control box to provide the command interface, power to the focal plane electronics, and to control coolers in the two S-Cubed cameras.
 |
The 17th HEXAGON mission, designated 1217, carried the S-Cubed camera system into space in 1982 and it worked properly. On mission 1218, launched in 1983, the satellite controllers decided to do something new. The former NRO official explains: “The CCDs also had a limited infrared (IR) capability, which on earlier vehicles were used to run experiments at the end of the normal mission to take views of the ground on north-bound local night time passes, with the vehicle flipped over on its back and rolled to one side to search for large IR signatures that might indicate activity. During northbound (night) portions of the orbit, the IR activity signature would have greater contrast with a cool earth background than during the daylight passes with a hot earth backdrop.”
Because the stellar cameras looked at the stars, pointing one of them at the ground was a substantial maneuver, flipping the bus-sized spacecraft head over tail in orbit. This used some of the reaction control system (RCS) gas. Because there was a risk that the spacecraft could get stuck in this position with its main cameras pointed out toward space, controllers only performed this pirouette at the end of the mission.
The 19th HEXAGON spacecraft, launched in 1984, also carried an S-Cubed camera system, and it too was successful during the tests. Unfortunately, that spacecraft experienced control problems that caused the ground controllers to cut the mission short. They loaded up all the film into the first three reentry vehicles and brought them down more quickly than usual out of concern that the spacecraft might die in orbit with film still aboard.
Just what exactly those S-Cubed sensors saw on missions 18 and 19 while flying over the Soviet Union at nighttime remains classified. “They knew the Russians were doing stuff at night that we couldn’t see,” Alesi explained. Intelligence officials had long been concerned about Soviet “denial and deception” efforts where they sought to hide activities, sometimes by conducting them at night.
  |
The last flight of the HEXAGON
The successful tests with the new camera capable of detecting infrared sources inside the Soviet Union prompted the NRO to add a new mission to the last HEXAGON flight: operating the satellite as an infrared detection platform. According to the former NRO official “there was some success with the experiments, so on vehicle 20, the spare S3 camera was added and mounted pointing down so that you wouldn't have to flip and roll the vehicle from south- to north-bound passes and back again every 45 minutes wasting precious RCS gas,” he explained. “It also allowed you to do this night time IR mission during the main mission rather than having to wait until the end of the main mission which had been done on the test on the previous vehicle.”
| Because of this new sensor, the last HEXAGON mission now had the ability not only to conduct infrared observations during its primary mission, but also to keep operating long after its primary mission was completed. |
Tom Alesi was put in charge of adding the additional S-Cubed camera to the spacecraft. There was no special designation for the project, no special program number. In fact, Alesi said that at Perkin-Elmer they only referred to the HEXAGON project as “Program 1” or “P1.” “HEXAGON or KH-9, that was a no-no,” he remembered. “It was always P-1.” They even used shorthand for all the components. The film platen, which held the film flat for exposure to light, was called “the PL” and the device that looped the film was called “the LO.” They reached a point where they had a hard time remembering the actual names for the parts of the camera system. Phil Pressel remembered that nobody at Perkin-Elmer ever mentioned the name of the customer—initially the CIA and later the US Air Force component of the National Reconnaissance Office. They were always referred to as “the customer.” All of this in the name of secrecy.
Alesi had to figure out the engineering for the special S-Cubed camera system. “It was mounted in the area between the film supply and the Two Camera Assembly,” he recalled. They cut a hole in the spacecraft so that the camera could look down at the Earth. They hired Schwartz Industries to produce a frame for holding the camera, milling it out of a large piece of aluminum about one meter square. Alesi remembered that each time he submitted his design the orders came back to make it stronger, so the frame got thicker and thicker.
Because of this new sensor, the last HEXAGON mission now had the ability not only to conduct infrared observations during its primary mission, but also to keep operating long after its primary mission was completed. It could orbit the Earth, taking infrared images of the Soviet Union until it ran low on reaction control thruster fuel. According to a mission report, the primary mission involving the main cameras was scheduled to last 300 days, longer than any previous HEXAGON mission. But then the spacecraft would continue to orbit on a “solo” mission for an additional 240 days, operating its infrared S-Cubed camera—a year and a half in orbit, twice as long as the longest HEXAGON mission.
The NRO was increasingly interested in infrared observations of the Soviet Union during the 1980s, and at some point, a new infrared observing capability named DRAGON was added to the KH-11 satellites. According to a former CIA analyst who was aware of DRAGON, it was a substantive improvement to the KENNEN, and almost certainly far more capable than the S-Cubed camera because it saw further into the infrared, meaning that DRAGON could see cooler infrared targets.
There was a lot riding on this last HEXAGON launch. “They crammed all they could on Vehicle 20 since it was the last and they knew there were some collection requirements and subsat missions that wouldn't see any new data or opportunities for a long time, if ever,” the former NRO official explained.
On April 20, 1986, the Titan 34D rocket carrying the last HEXAGON rose above the launch pad and then blew itself to smithereens, raining debris down on the pad and surrounding area, starting small brush fires and damaging buildings and some vehicles parked near the pad. It was a devastating end to a program that many people had spent their entire careers working on.
An investigation revealed that some insulation inside one of the rocket’s solid boosters had come loose, allowing exhaust gases to escape and burn through the casing, leading to a rapid explosion. After Alesi went back to Perkin-Elmer’s facility in Danbury, Connecticut, he later talked to somebody involved in the laborious process of cleaning up the classified debris. That person told him that they found the sturdy aluminum frame that held the additional S-Cubed camera. It was still intact: clearly more than strong enough.
Notes
[Name deleted] Memorandum for Dr. McLucas, “HEXAGON Near-Real-Time Readout,” January 21, 1971.
Dwayne Day can be reached at zirconic1@cox.net.
댓글
댓글 리스트-
작성자백선호 작성시간 25.11.09 "그들은 적어도 부분적으로는 체코슬로바키아 침공 당시의 경험에 의해 자극을 받았다. 그때 소련 침공군은 미 정찰위성에 촬영되었지만, 필름은 침공이 발생한 후에야 확인되었다."
1968년의 체코슬로바키아 침공이 소련/러시아가 벌인 '공수부대의 기습 침공/지도부 제거/기정사실화'의 원판같은 것인데 이 시나리오를 MANPADS가 득실거리는 2022년 우크라이나에 썼다가 망했네요. -
답댓글 작성자위종민 작성자 본인 여부 작성자 작성시간 25.11.10 아프간에서도 잘 썼고.. 일종의 성명절기같은 느낌이었는데 ㅎㅎㅎ