모듈별 정리 (io / visualization / geometry)
• open3d.io : 모듈 : 파일 입출력과 관련된 함수와 클래스를 모아 놓은 모듈
open3d.io.<멤버함수> : read_triangle_mesh / read_line_set / write_point_cloud
• open3d.visualization : 모듈 : 3차원 데이터(pcd, mesh)를 시각화하기 위한 클래스와 함수들을 제공하는 open3d 모듈
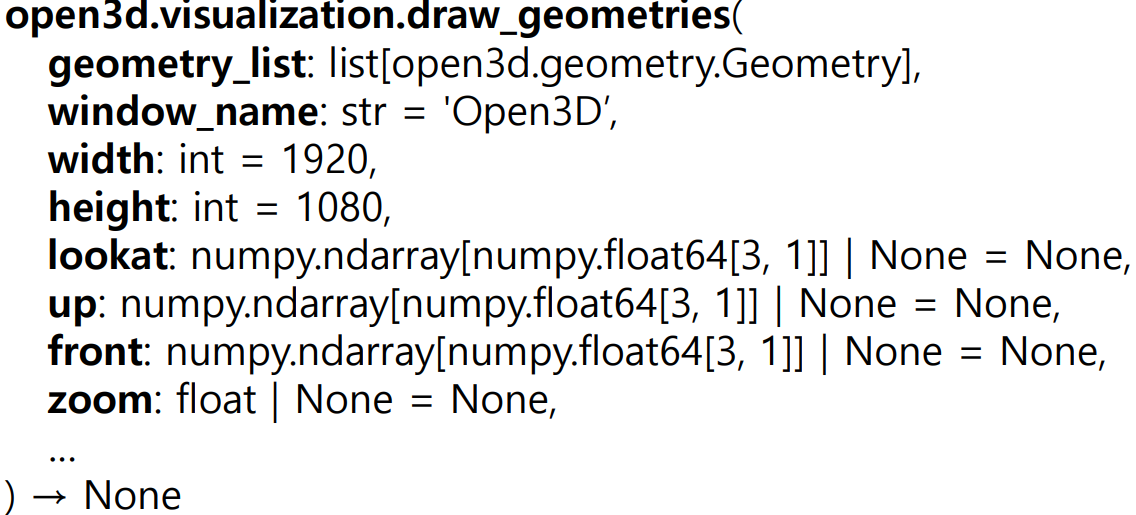
geometry_list: 시각화 할 geometry(3차원 기하학적 도형)의 리스트 (ply/pcd 파일로 불러온 도형 & 좌표계 등)
window_name: 윈도우 이름
width & height: 시각화 윈도우의 폭 & 높이
lookat: 카메라가 바라보는 대상 위치 (월드 좌표계 기준)
up: 카메라 좌표계의 수직(up) 축
front: 카메라가 바라보는 방향 벡터
zoom: (확대/축소 비율, 작을수록 확대됨)
- open3d.visualization.draw_geometries : 함수 : 시각화 (+시점 조정)
- up벡터와 front벡터는 수직 관계임 (두 벡터의 내적=0) (front=[1,1,1], up=[-1,2,-1])
- Camera position vector = lookat + (zoom * front)
- open3d.visualization.Visualizer : 클래스 : draw_geometries 함수보다 세밀
• open3d.geometry : 모듈 : 3차원 기하학적인 데이터를 처리하기 위한 클래스와 함수들을 제공하는 open3d 모듈
open3d.geometry.<클래스> : LineSet / TriangleMesh / AxisAlignedBoundingBox / PointCloud / VoxelGrid
- open3d.geometry.LineSet : 객체 생성시 멤버변수(points, lines) 정의 필요 ("colors"는 인자x)
- points type : open3d.utility.Vector3dVector (float64 array of shape) np.array일 때는 인자x (lines → 인자x)
- lines type : open3d.utility.Vector2iVector (int array of shape)
- colors type : open3d.utility.Vector3dVector (float64 array of shape) 인자x
- open3d.geometry.TriangleMesh
- open3d.geometry.TriangleMesh.<멤버함수> : create_coordinate_frame / create_box / create_cylinder / create_sphere
반환형 → open3d.geometry.TriangleMesh
- (생략..)create_coordinate_frame(size, origin) : 3차원 좌표축 생성
- (생략..)create_box(width, height, depth) : 직육면체 생성
+ open3d.geometry.TriangleMesh(객체).<멤버함수>
- (생략..)translate([X,Y,Z]) : 3D 객체의 중점으로부터 이동
- (생략..)compute_vertex_normals() : 명암
- (생략..)paint_uniform_color([r,g,b]) : 0~1 범위 실수
(아래 추가 설명..)
- open3d.geometry. AxisAlignedBoundingBox : 객체 생성시 멤버변수(min_bound, max_bound) 정의 필요 ("color"는 인자x)
- min_bound : numpy.array([x,y,z])
- max_bound : numpy.array([x,y,z])
- color : [r,g,b] (0~1 float type)
+ open3d.geometry. AxisAlignedBoundingBox(객체).<멤버함수>
- (생략..)get_box_points(): numpy로 변환시켜 출력해야 됨
- (생략..)get_center(): 직육면체 중앙좌표(position) 출력
- (생략..)get_extent()
- open3d.geometry.OrientedBoundingBox : 객체 생성시 멤버변수(center, rotation, extent) 정의 필요 ("color"는 인자x)
- center : numpy.array([x,y,z])
- rotation : 바운딩박스 중심에서 x,y,z축 방향의 회전각도 (아래의 함수를 이용하여 구함)
- open3d.geometry.get_rotation_matrix_from_axis_angle(numpy.float64[3,1])
반환형 → numpy.ndarray[numpy.float64[3,3]] (ndarray란? numpy의 N차원 배열 객체)
- extent : numpy.array([x,y,z])
- color : [r,g,b] (0~1 float type)
- open3d.geometry.PointCloud : 객체 생성 후 멤버변수(points, color, normals) 정의
- points type : open3d.utility.Vector3dVector(numpy_points) (자료형: float64 array of shape)
+ open3d.geometry.PointCloud(객체).<멤버함수>
- (생략..)get_axis_aligned_bounding_box : Point Cloud를 둘러싸는 AABB를 리턴
- (생략..)get_minimal_oriented_bounding_box : Point Cloud를 둘러싸는 최소의 OBB를 리턴
- (생략..)get_oriented_bounding_box : Point Cloud를 둘러싸는 OBB를 리턴
+ (생략....)color : [r,g,b] (0~1 float type)
3D bounding box: 3차원 객체를 포함하는 최소 부피의 직육면체
- AABB (Axis-Aligned Bounding Box)
- 3차원 객체의 모든 점을 포함하는 최소크기의 직육면체 중 각 변이 x,y,z축에 평행
- min(좌측하단 꼭지점)과 max(우측상단 꼭지점)로 정의
- OBB (Oriented Bounding Box)
- 임의의 방향을 갖는 3차원 직육면체이고, 각 변이 x,y,z축에 평행하지 않음 → 3D 객체를 둘러싸는 최소 부피의 직육면체
- (x,y,z): 중심좌표 / R: 회전행렬 / (length, width, height): x,y,z축 방향의 크기로 정의
- R(rotation): 회전행렬은 바운딩 박스의 방향을 정의하는 파라미터 (함수를 이용하여 구함)
1. Open3d 좌표의 단위는 무엇인가?
meter 단위로 사용됨
2. Open3d 각도의 단위는 무엇인가?
radian 단위로 사용됨 (회전 행렬인 get_rotation_matrix_from_axis_angle 함수)
3. Open3d 컬러를 정의하는 방법은?
RGB 3채널 형식으로 지원됨 (0~1, float)
4. Open3d.geometry.TriangleMesh.create_box의 width, height, depth의 정의를 설명하시오. 각 인자의 축의 방향을 설명하시오.
static create_box(width: float = 1.0, height: float = 1.0, depth: float = 1.0, …)
- width: x축 방향의 길이
- height: y축 방향의 길이
- depth: z축 방향의 길이
5. Open3d 바운딩박스의 length, width, height의 정의는 무엇인가?
- length: x축 방향의 길이
- width: y축 방향의 길이
- height: z축 방향의 길이
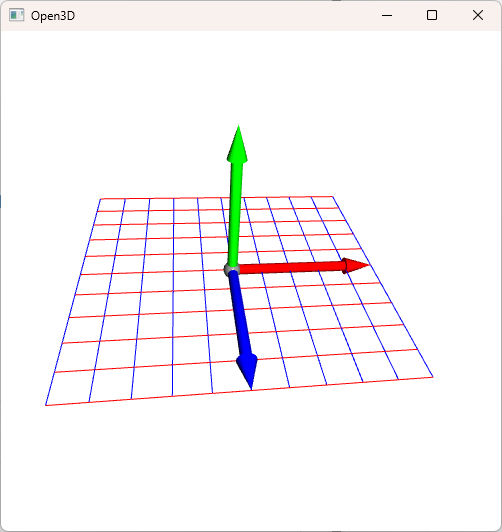
문제 6번.
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 | import open3d as o3d points = [] lines = [] colors = [] itv = 0.2 index = 0 for i in range(11): # x,y축 고정 / z축 이동 points.append([-1, 0, -1 + (itv * i)]) points.append([1, 0, -1 + (itv * i)]) lines.append([2 * index, 2 * index + 1]) colors.append([1,0,0]) index += 1 # y,z축 고정 / x축 이동 points.append([-1 + (itv * i), 0, -1]) points.append([-1 + (itv * i), 0, 1]) lines.append([2 * index, 2 * index + 1]) colors.append([0,0,1]) index += 1 line_set= o3d.geometry.LineSet(o3d.utility.Vector3dVector(points), o3d.utility.Vector2iVector(lines)) line_set.colors= o3d.utility.Vector3dVector(colors) axis_frame= o3d.geometry.TriangleMesh.create_coordinate_frame(size=1, origin=[0,0,0]) o3d.visualization.draw_geometries([line_set, axis_frame],width=500,height=500) | cs |
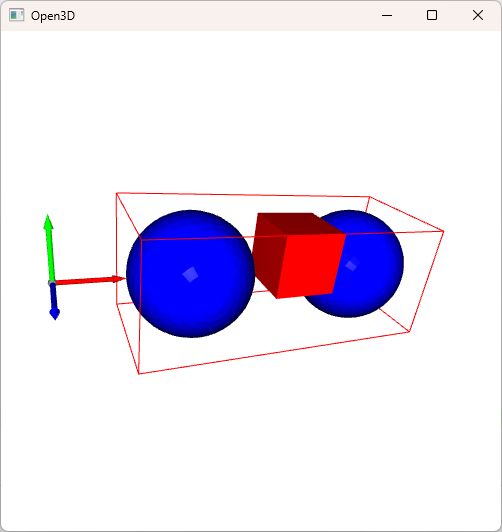
문제 7번.
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 | import open3d as o3d mesh_box= o3d.geometry.TriangleMesh.create_box(width=1.0,height=1.0,depth=1.0) mesh_box.translate([3,0,0]) mesh_box.compute_vertex_normals() mesh_box.paint_uniform_color([1,0,0]) mesh_sphere1= o3d.geometry.TriangleMesh.create_sphere(radius=1.0) mesh_sphere1.translate([2,0,0]) mesh_sphere1.compute_vertex_normals() mesh_sphere1.paint_uniform_color([0,0,1]) mesh_sphere2= o3d.geometry.TriangleMesh.create_sphere(radius=1.0) mesh_sphere2.translate([5,0,0]) mesh_sphere2.compute_vertex_normals() mesh_sphere2.paint_uniform_color([0,0,1]) combined_mesh = mesh_box + mesh_sphere1 + mesh_sphere2 combined_bbox = combined_mesh.get_axis_aligned_bounding_box() combined_bbox.color = [1,0,0] mesh_frame= o3d.geometry.TriangleMesh.create_coordinate_frame(size=1,origin=[0,0,0]) o3d.visualization.draw_geometries([combined_bbox, mesh_box, mesh_sphere1, mesh_sphere2, mesh_frame],width=500,height=500) | cs |
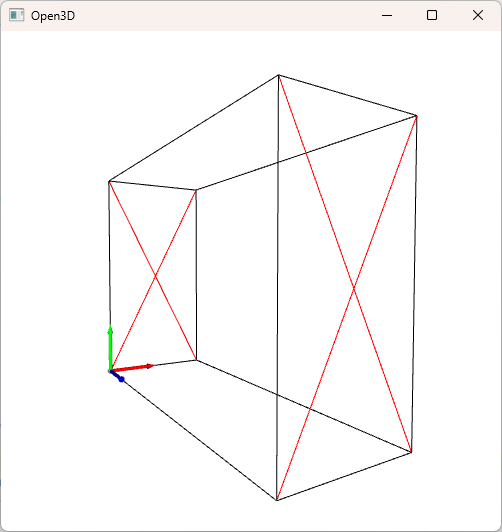
문제 8번.
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 | import open3d as o3d import numpy as np min_bound= np.array([0.0, 0.0, 0.0]) max_bound= np.array([1.0, 2.0, 3.0]) aabb= o3d.geometry.AxisAlignedBoundingBox(min_bound=min_bound, max_bound=max_bound) aabb.color= [0,0,0] points = np.array(aabb.get_box_points()) #numpy 변환 lines = [ [0, 7], [1, 2], [3, 4], [5, 6] ] colors = [[1, 0, 0] for i in range(len(lines))] line_set= o3d.geometry.LineSet(o3d.utility.Vector3dVector(points), o3d.utility.Vector2iVector(lines)) line_set.colors= o3d.utility.Vector3dVector(colors) axis_frame= o3d.geometry.TriangleMesh.create_coordinate_frame(size=0.5, origin=[0, 0, 0]) o3d.visualization.draw_geometries([line_set, aabb,axis_frame], width=500, height=500) | cs |
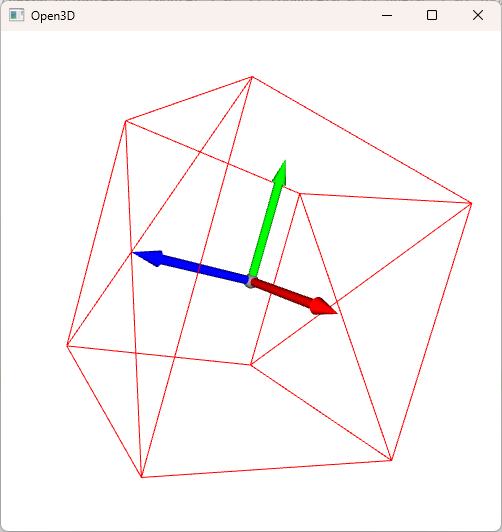
문제 9번.
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 | import open3d as o3d import numpy as np min_bound= np.array([-1,-1,-1]) max_bound= np.array([1, 1, 1]) aabb= o3d.geometry.AxisAlignedBoundingBox(min_bound=min_bound, max_bound=max_bound) aabb.color= [1,0,0] points = np.array(aabb.get_box_points()) lines = [ [0, 7], [1, 2], [3, 4], [5, 6] ] colors = [[1, 0, 0] for i in range(len(lines))] line_set= o3d.geometry.LineSet(o3d.utility.Vector3dVector(points), o3d.utility.Vector2iVector(lines)) line_set.colors= o3d.utility.Vector3dVector(colors) axis_frame= o3d.geometry.TriangleMesh.create_coordinate_frame(size=1,origin=[0, 0, 0]) o3d.visualization.draw_geometries([line_set, aabb,axis_frame],width=500,height=500) | cs |
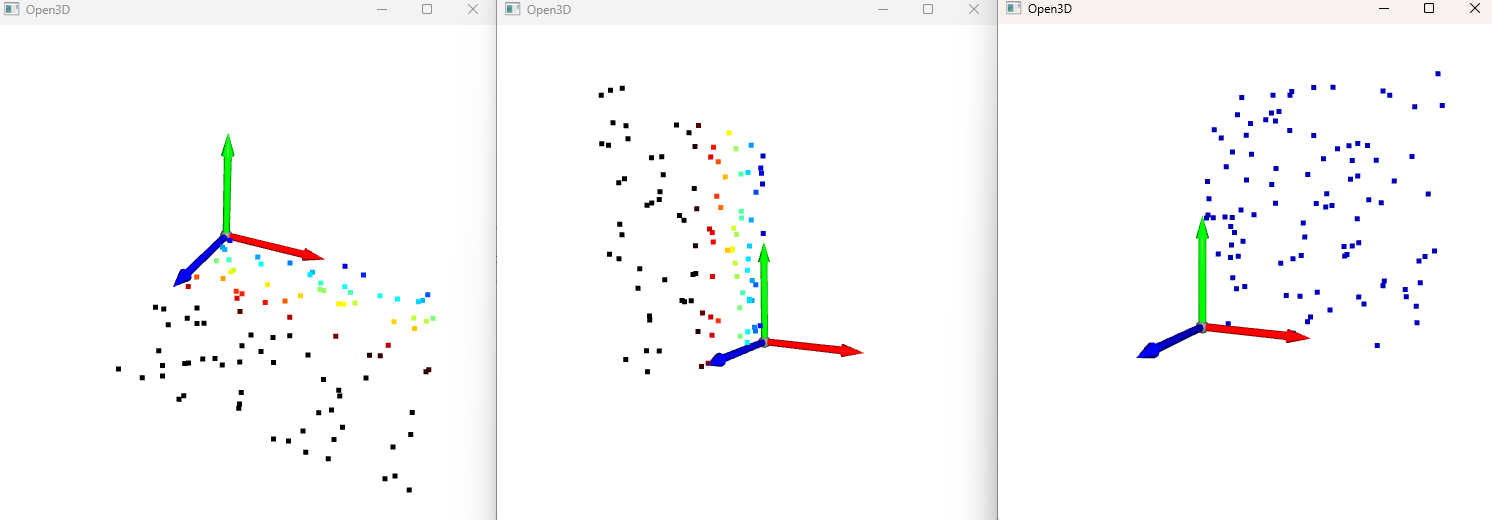
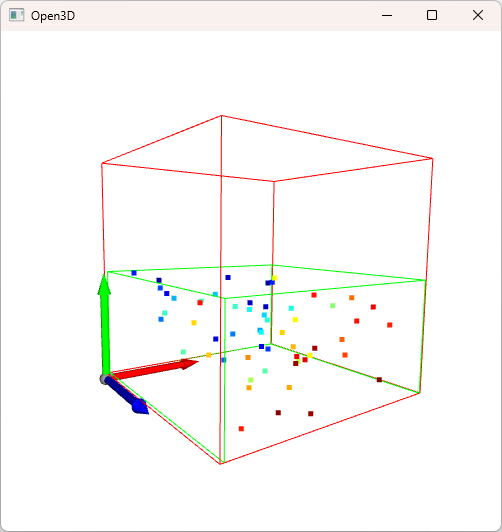
문제 10번.
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 | import open3d as o3d import numpy as np pcd= o3d.geometry.PointCloud() np_points= np.random.rand(100, 3) #(x,y,z) pcd.points= o3d.utility.Vector3dVector(np_points) aabb1 = pcd.get_axis_aligned_bounding_box() aabb1.color= [1,0,0] min_bound = aabb1.get_min_bound() max_bound = aabb1.get_max_bound() y_center = (min_bound[1] + max_bound[1]) / 2 #y축 1/2 np_points = np_points[np_points[:, 1] <= y_center] half_pcd = o3d.geometry.PointCloud(o3d.utility.Vector3dVector(np_points)) aabb2 = half_pcd.get_axis_aligned_bounding_box() aabb2.color = [0,1,0] axis_frame= o3d.geometry.TriangleMesh.create_coordinate_frame(size=0.5,origin=[0, 0, 0]) o3d.visualization.draw_geometries([half_pcd, axis_frame, aabb1, aabb2],width=500,height=500) | cs |
문제 11번.
1 2 3 4 5 6 7 8 9 10 11 12 13 14 | import open3d as o3d import numpy as np np_points= np.random.rand(100, 3) np_points[: ,1] = 0 #zx 평면으로 투영 # np_points[: ,0] = 0 #yz 평면으로 투영 # np_points[: ,2] = 0 #xy 평면으로 투영 pcd= o3d.geometry.PointCloud() pcd.points = o3d.utility.Vector3dVector(np_points) axis_frame= o3d.geometry.TriangleMesh.create_coordinate_frame(size=0.5,origin=[0, 0, 0]) o3d.visualization.draw_geometries([pcd, axis_frame],width=500,height=500) | cs |