CAN-BUS 라고도 하는 Controller Area Network는 긴 이동 거리, 중간 수준의 통신 속도 , 높은 신뢰성 으로 인해 널리 사용되는 산업용 버스입니다 . 최신 공작기계와 자동차 진단 버스에 널리 사용됩니다.
일반적으로 CAN 통신 속도는 50Kbps 에서 1Mbps 이며 , 전송 거리는 1Mbps로 40미터 에서 50Kbps로 1000미터 까지 가능합니다 .
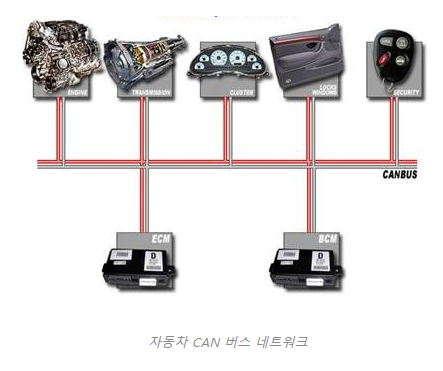
CAN 버스(Controller Area Network)
CAN 버스는 보쉬(Bosch)가 개발한 자동차용 버스로, 호스트 컴퓨터 없이 차량 내 마이크로컨트롤러와 장치들이 서로 통신할 수 있도록 합니다. CAN 버스는 자동차 애플리케이션을 위해 특별히 설계된 메시지 기반 프로토콜이지만, 현재는 항공우주 , 산업 자동화, 의료 장비 등 다른 분야에서도 사용되고 있습니다.
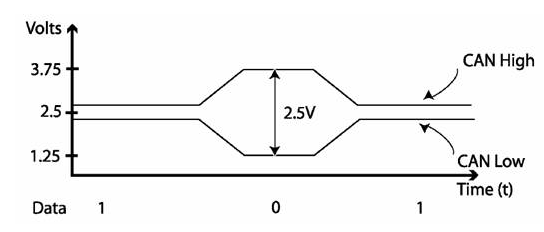
CAN 버스는 통신을 위해 두 개의 전용선을 사용합니다. 이 선들은 CAN High와 CAN Low라고 합니다.
CAN 버스가 유휴 모드일 때 두 라인 모두 2.5V를 전달합니다. 데이터 비트가 전송될 때 CAN High 라인은 3.75V로 상승하고 CAN Low 라인은 1.25V로 낮아져 두 라인 간에 2.5V 차이가 발생합니다.
CAN 버스 통신의 특성상 모든 모듈이 버스를 통해 데이터를 송수신할 수 있습니다. 모든 모듈은 데이터를 전송할 수 있으며, 나머지 모든 모듈은 데이터를 수신합니다.
대부분의 자동차 CAN 네트워크는 250kB/s 또는 500kB/s의 버스 속도로 작동합니다.
I2C와 SPI를 통한 CAN 비교

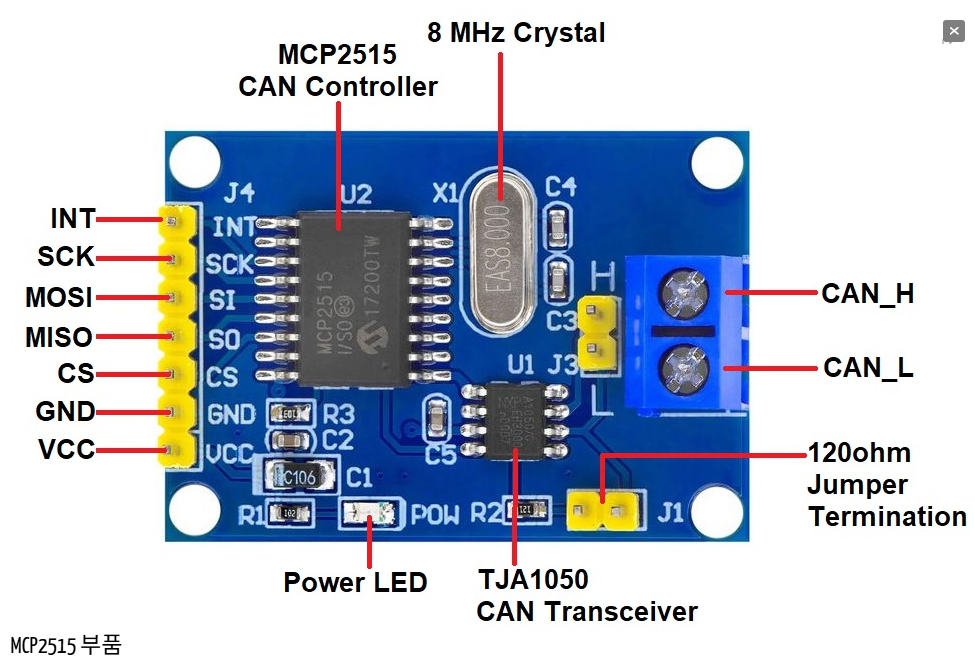
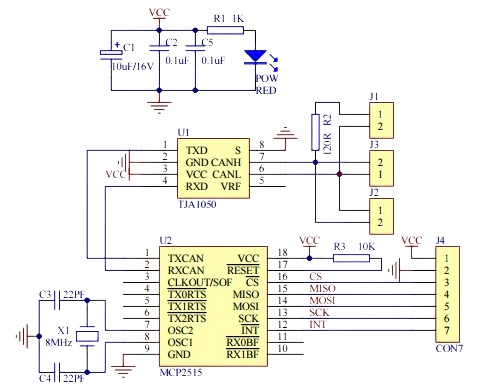
MCP2515 CAN 버스 컨트롤러 모듈
MCP2515 CAN 버스 컨트롤러는 CAN 프로토콜 버전 2.0B를 지원하고 1Mbps 속도로 통신하는 데 사용할 수 있는 간단한 모듈입니다.
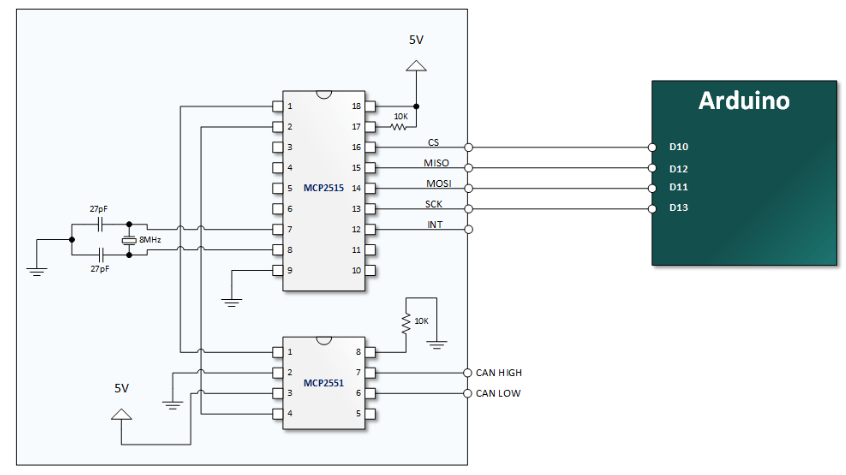
이 모듈은 MCP2515 CAN 컨트롤러 IC와 TJA1050 CAN 트랜시버 IC를 기반으로 합니다. MCP2515 IC는 독립형 CAN 컨트롤러이며, 마이크로컨트롤러와의 통신을 위한 SPI 인터페이스가 내장되어 있습니다. TJA1050 IC의 경우, MCP2515 CAN 컨트롤러 IC와 물리적 CAN 버스 간의 인터페이스 역할을 합니다.
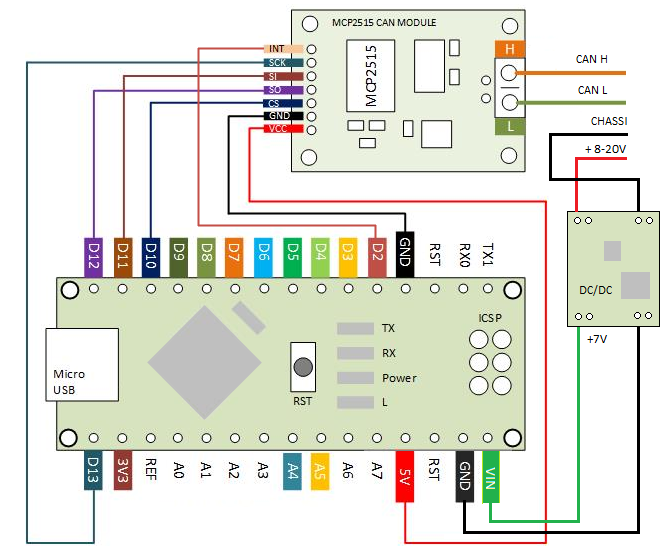
CAN 통신 Arduino LIB == MPC2515 CAN 통신 모듈에 적용