CAN 통신 동작모드는 총 3개가 있다.
1. sleep 모드 : Reset 시는 sleep 모드 상태이고 초기화 함수를 호출하면 initialization 모드에 들어간다.
== 송수신 불가능
2. initialization 모드 == 송수신 불가능 :
3. normal 모드 : 송수신 전송이 가능 한 상태 == HAL_CAN_Start() 함수를 통해서 송수신이 가능한 상태로 된다.
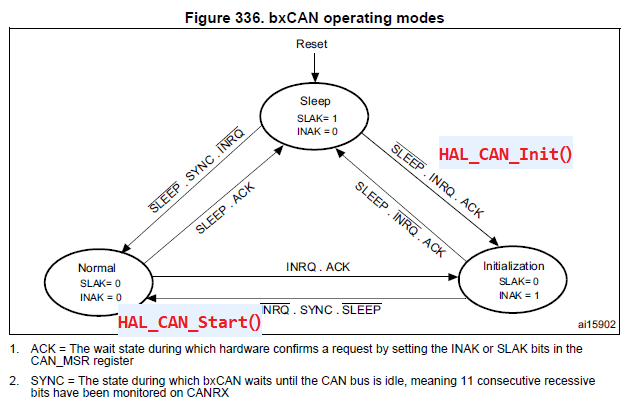
CAN의 동작 모드에는 3가지
1. Sleep == >> MCU의 초기 reset 상태에서는 Sleep 모드에서 시작한다. == 송수신 불가능
2. Initialization == >> 초기 Sleep 모드에서 Initialization 모드로 변경은 HAL_CAN_Init()함수로
구현된다. == 송수신 불가능
3. Normal ==>> Can Controller이 정상동작한다. == 송수신 가능
HAL_CAN_Start() 함수를 통해서 Initialization 모드에서 Normal 모드로
진입하며 이때부터 송수신이 가능하다.
다음검색
스크랩 원문 :
마이크로프로세서 제어 연구실