2. 종류
- PM(고정 작석형) : 가격이 저렴, 저가격 간단한 제어 = 일반적으로 많이 사용됨 = 가장 많이 보급됨
- VR(리액턴스형) : 전자석 원리이용
- HB형 : PM형 + VR형 == 고가, 정밀 위치제어에 사용
2. 구동방식
1.1 유니폴라
2.2 바이폴라
3. 여자방식
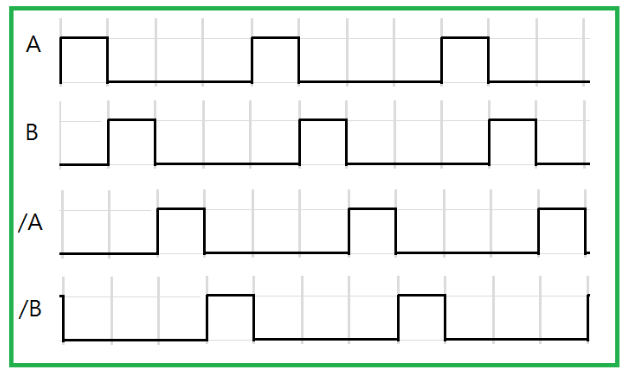
3.1 1상여자
- 풀 스탭 구동방식
- 1.8 deg = 200pulse 필요
- 온도가 낮고, 소비전력이 적고,
- 토크가 클수록 진동이 심하다. = 한 스텝 돌때마다 진동이 심하다.
- 각 STEP당 90도씩 회전
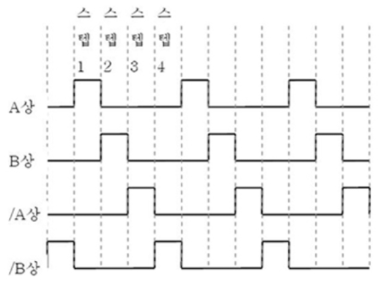
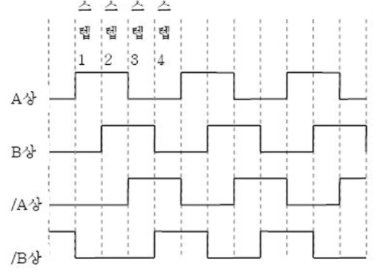
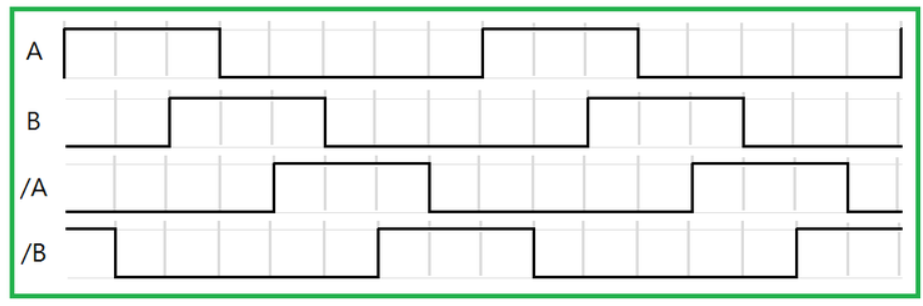
3.2 2상여자
- 토크가 좋다. = 토크를 좋게하기 위해서 2개의 코딜을 동시에 동작시킴.
- 열이 많이나는 푠
- 전류 소비량이 크다.
- 풀 스텝방식
- 과도 특성이 좋아짐 == 한 스템 돌고나서 진동이 작아 짐
- 각 STEP당 90도씩
-
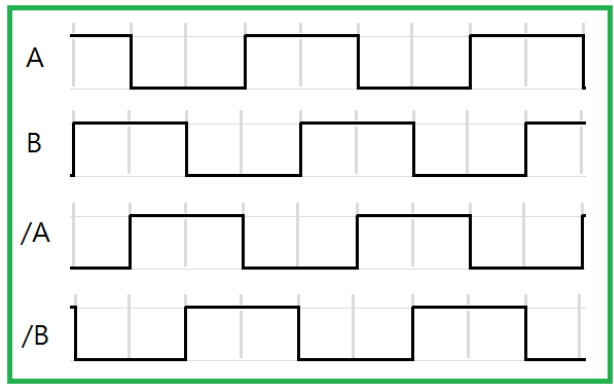
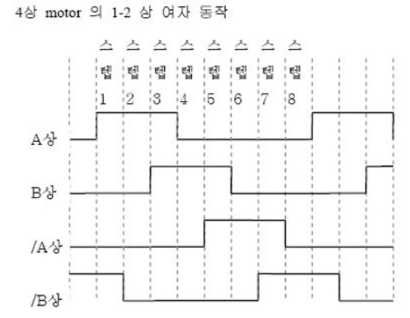
3.3 1-2상여자
- 하프스템 구동방식
- 1.8deg ==>> 0.9도 회전시킴
- 360도 = 400펄스가 필요
- 각 스탭당 45도식 회전
- 가장 성능이 졸고 부드럽게 회전한다.
- 단점은 다른 여자방식과 같은 속도를 내려면 마이크로 컨트롤러에서 클럭을 2배로 만들어야 한다.
3.4 마이크로 스탭
- 고 분해능 운전 가장
- 리니어티가 좋은
- 전용 제어기 사용
- 적절한 전류를 흐르게하기위해 PWM방식으로 ㅁtkd, B상에 전류를 가한다.