고경철 교수님 사이트에서 퍼옴
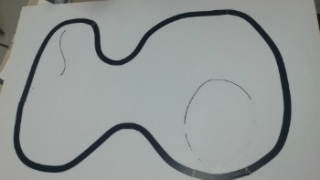
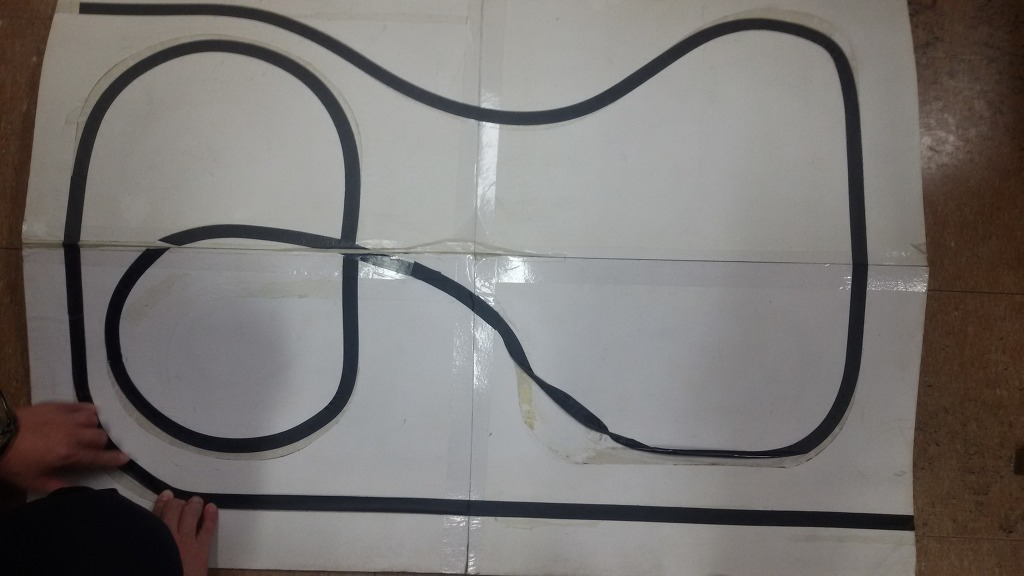
레이싱 맵 제작



라인트레이서 제작
(1) 사전에 논의하며, 아이디어회의를 한다
(2) 라인트레이서 제작시 고려할 점을 최대한 알아낸다.
(3) 성능은 가능한한 빠르고 정확하게 목표점에 갈 수 있는 로봇을 제작하는 것.
(4) 스케치를 하여본다.
(5) 1차작품을 만들고, 성능을 측정한다.
(6) 문제점을 파악한다.
(7) 2차/3차작품 설계변경을 통해, 성능변화를 살펴본다.
(8) 일련의 과정을 기록(촬영,그림)하고, 그때의 성능평가(시간측정, 동영상)를 하여본다.
(9) 팀원간의 논의과정도 기록한다.
(10) 발표준비를 중간중간에 계속 만들어 나간다.
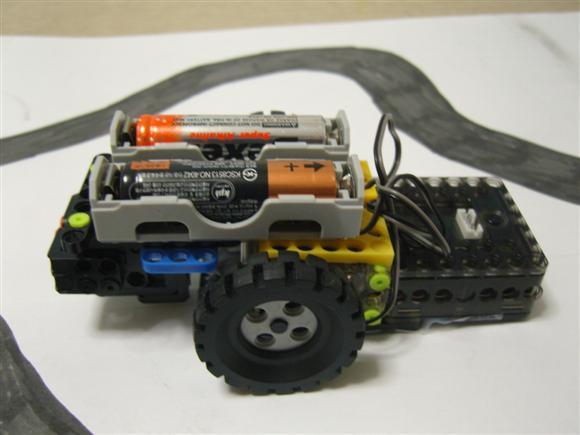
몸체를 제작한다.
주의할점
(1) 타이어와 모터의 결합시: 마찰을 피하기 이해, 모터와 타이어의 결합 방향을 잘 결정한다.
(2) 모터축과 본체와의 결합시: 마찰을 피하기 위해, 링(ring)을 사용한다.

테스트하기:
내장 IR센서만으로 라인을 트레이싱하는 프로그램입니다 ( ![]() 16TraceMode.zip )
16TraceMode.zip )
(1) 1번 커넥터 모터를 오른쪽 바퀴에 사용하고,
(2) 2번 커넥터 모터를 왼쪽바퀴에 사용하도록 합니다.
(3) 결선방향은 회색선이 위로 가도록 합니다.
실행하면 다음과 같다.
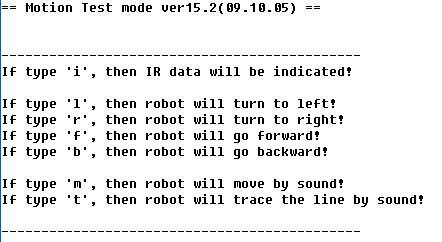
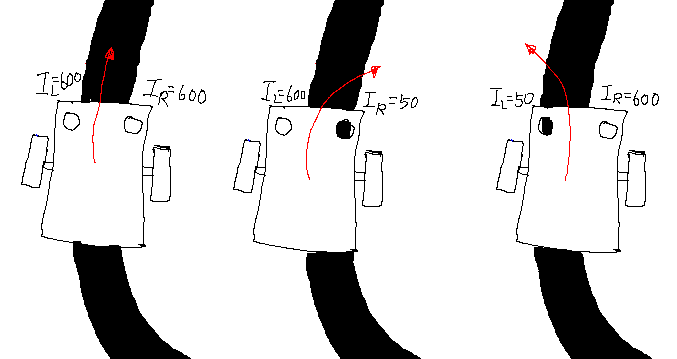
1) i를 치면, 적외선센서값이 출력됩니다. (I = IR - IL)
로봇을 라인 가운데에 위치하고, 오른쪽으로 벗어나면, +값이 커지고, 왼쪽으로 벗어나면 -값이 커짐을 확인 합니다.
2) f를 치면 전진, b를 치면 후진
3) m을 치면, 박수소리에 전진
다음검색