라인 트레이서를 만들어 보자. 다음과 같은 순서로 진행하면 결과를 쉽게 얻을 수 있다.
| 1. 라인트레이서 이론과 소스코드를 이해하자. 2. 보드에 센서와 모터를 연결한다. 3. 예제로 모터를 Model Scan을 해보자. 4. 소스코드를 다운 받아 실행하자. 시리얼모니터에서 왼쪽, 오른쪽, 전진, 후진 테스트 5. 로봇을 만든다. 6. USB 전선을 뽑고 배터리 전원을 이용해 테스트를 해보자. |
1. 라인트레이서의 원리
* 검은색 테이프에 대해 두 센서의 값 차이를 이용하여 왼쪽/오른쪽 모터를 동작시켜 라인을 따라가는 원리이다. 센서 값 조건을 확인하여 정확한 동작을 할 수 있도록 완성해 보자.

[왼쪽으로 회전] [전진] [오른쪽으로 회전]
* 센서값 차이를 측정하여 아래 빈칸에 적는다.
| 상태 | 왼쪽에 라인이 있는 경우 | 가운데 라인이 있는 경우 | 오른쪽에 라인이 있는 경우 |
| 두 센서와 검은 색 라인의 위치 |  |  |  |
| 센서값 차이 (dif = ir_s1 - ir_s2) |
2. 센서와 모터를 테스트해보자
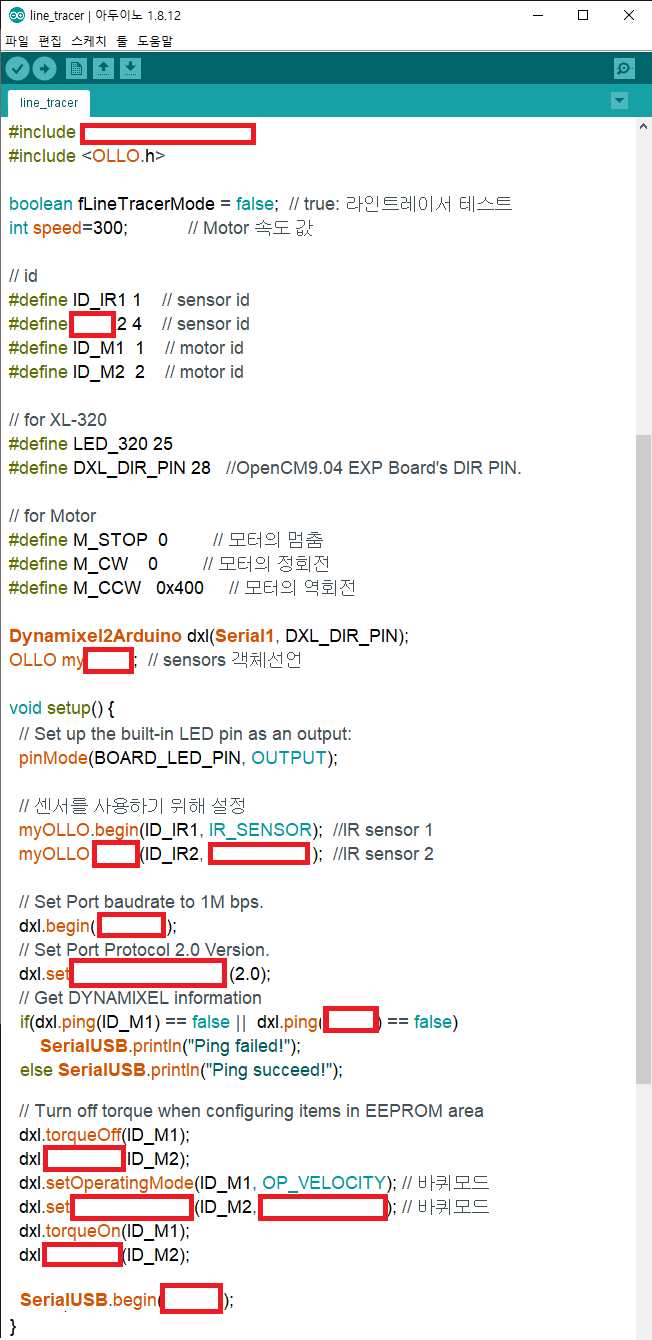
(1) 아두이노 프로그램을 실행하고 새파일을 열어 소스코드를 작성한다.
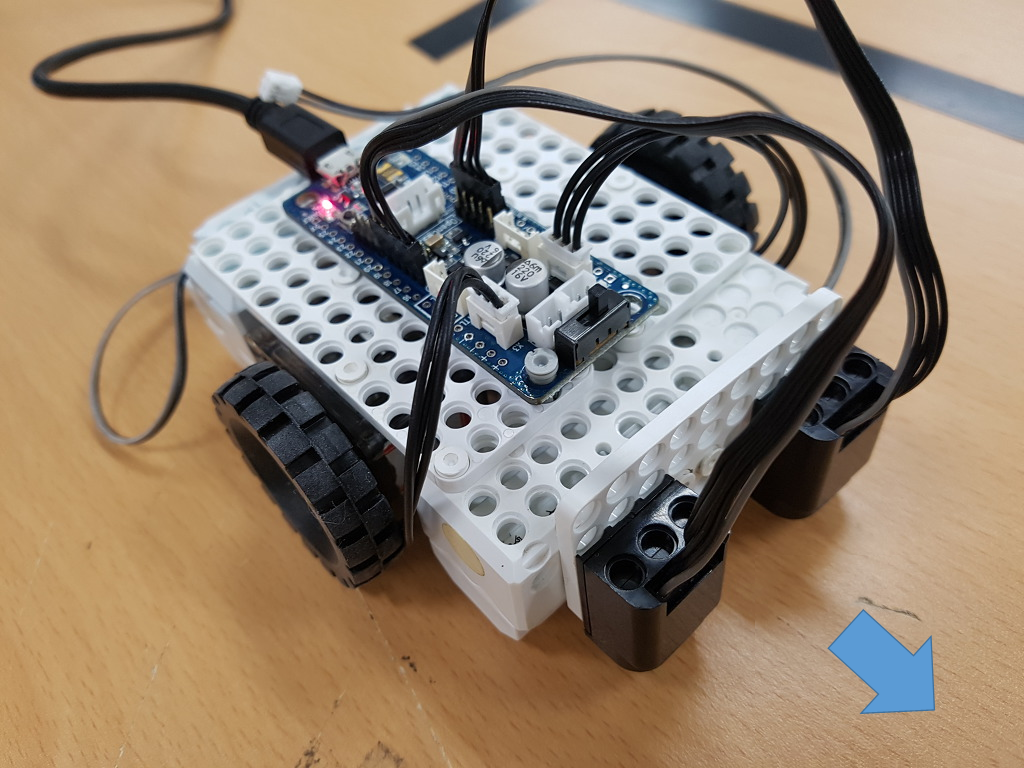
(2) 다음 그림과 같이 센서와 모터, 그리고 배터리를 연결한다.
(3) 업로드 하여 실행해 본다.
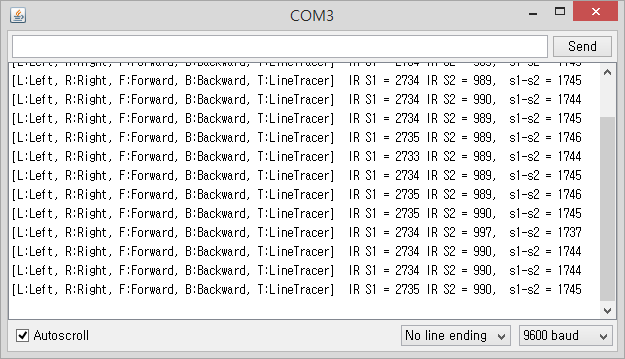
(4) 시리얼 모니터를 실행해서 모터를 제어해 보자.

* 시리얼모니터에서 다음 키를 입력하여 모터의 동작을 테스트 한다.
| 동작 | 왼쪽 회전 | 오른쪽 회전 | 전진 | 후진 | 멈춤 | 라인트레이서 테스트 |
| 키(소문자/대문자) | L | R | F | B | S | T |
3. 라인트레이서 모형 조립
각종 플래이트와 못으로 모형을 조립한다.
- 바뀌 조립

밑면 조립

적외선 센서 조립

- 배터리 조립


- 몸체 완성

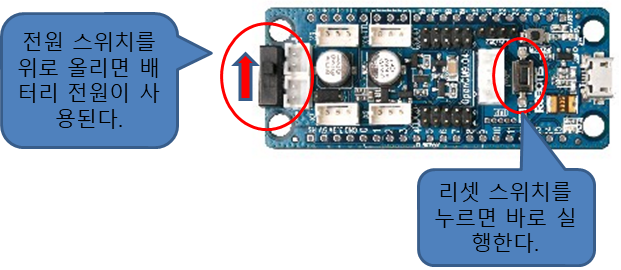
- OpenCM 9.04 보드 조립
4. 소스 설명
| /* Line Tracer를 테스트 하는 프로그램입니다. version 0.7 2015-2학기 창의적공학설계 수업 예제 코드로 이용합니다. 담당교수: 고경철,한창호 작성일: 2015. 9. 21 아두이노버전: 작성일: 2020.11.02 */ // boolean fLineTracerMode = true; 로 바꾸면 USB 전선없이 배터리로 동작 가능하다. // usb선을 뽑고 RESET 버튼을 누르면 동작한다. boolean fLineTracerMode = false; // 모터 속도 변경 가능하다. (0~1023), 1000 값이 넘어 가면 동작이 잘 안되는 경우도 있다. int speed=300; // Motor 속도 값 // 시리얼모니터를 동작 시키면서 업로드시 Com Port 연결이 실패할 수 있다. // 다음과 같이 delay()함수를 추가해 보자. void setup() { ... SerialUSB.begin(115200); delay(1000); ... } |
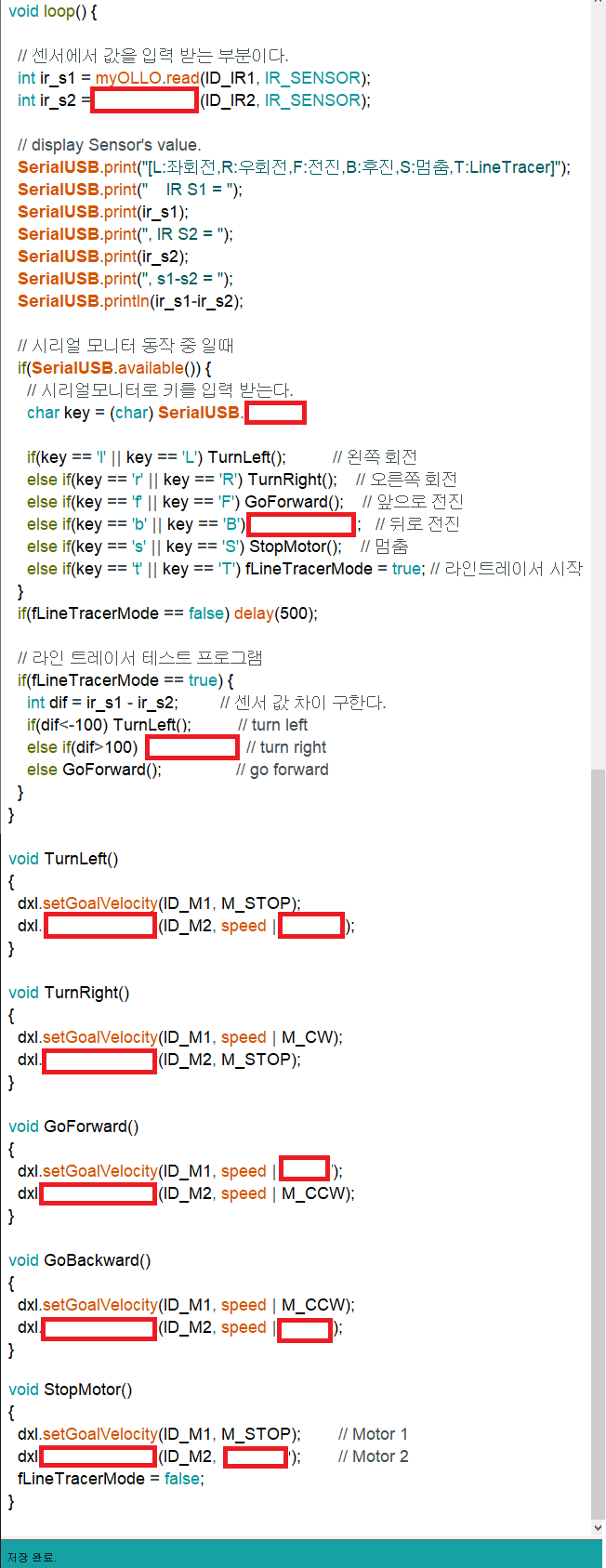
소스코드
5. 미션 수행하기
| 미션 | 라인 따라가기 | 정지선 멈추기 | 두 번째 정지선 멈추기 |
| 수행여부(O/X) |
다음검색