모터를 제어합니다. 친절한 고교수님이 학생들을 지도하고 계십니다.

1. 배선 연결도


위 사진은 Ezi-Servo 연결도 이다. RS485를 이용하여 명령을 전달한다. 또는 Digital I/O 포트를 이용하여 직접 제어하기도 한다.
2. 드라이버 설치
드라이버를 설치하고 GUI 프로그램을 다운 받는다. 다음 사이트에서 다음 두 가지를 다운 받아 설치한다.
http://www.fastech.co.kr/bbs/bbs/board.php?bo_table=board5
| 77 |

| 76 |
| 13 |
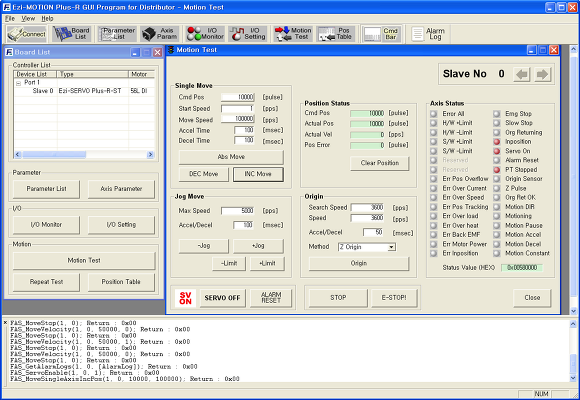
3. 프로그램 연결하기
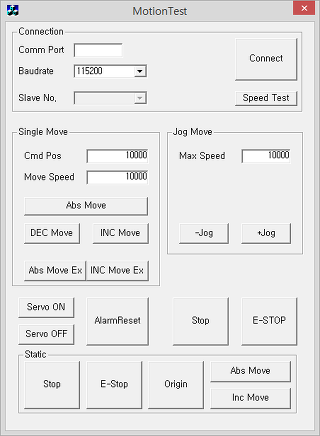
테스트 프로그램 "C:\Program Files (x86)\FASTECH\EziMOTION_PlusR\EziMOTION.exe"
프로토콜 테스트 "C:\Program Files (x86)\FASTECH\EziMOTION_PlusR\ProtocolTest_PlusR.exe"
- Com port를 연결한다.
- Servo On을 동작한다.
4. 프로그램 작성
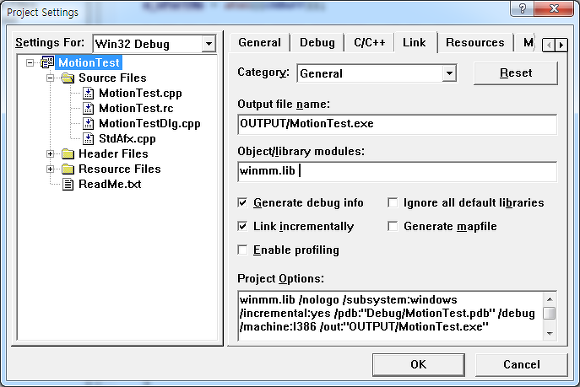
1) 속성창에서 다음을 추가 한다.
Include 파일:
\Fastech\EziMotion PlusR\Include\FAS_EziMotionPlusR.h
\Fastech\EziMotion PlusR\Include\ReturnCodes_Define.h
\Fastech\EziMotion PlusR\Include\MOTION_DEFINE.h
\Fastech\EziMotion PlusR\Include\COMM_Ddefine.h
Library 파일들:
\Fastech\EziMotion PlusR\Include\EziMotionPlusR.lib
Library 추가: winmm.lib
2) 예제 소스 (C:\Program Files (x86)\FASTECH\EziMOTION_PlusR\Examples)