* 라이다 종류
| 종류 | 사양 | 그림 |
| SLAMTEC RPLIDAR C1 디바이스바트 99,000원 | 측정거리 흰색 물체:0.05~12m (70%반사율) 검정 물체:0.05~6m (10%반사율) 샘플링 주파수 5KHz 스캔 주파수 8~12Hz, 10Hz (전형적인 값) 각도 분해능 0.72° 피치 각도 0°-1.5° 통신 인터페이스 TTL UART 통신속도 460800 측정거리오차 ±30mm 거리측정 분별력 15mm 보호 등급 IP54 반사 강도 40,000lux 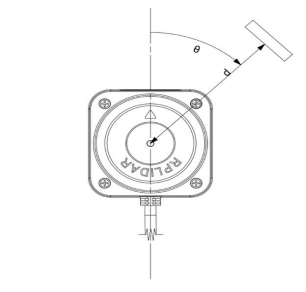  |   |
* 라이다 원리
| 구분 | 설명 |
| 원리 | LiDAR란 Light Detection And Ranging (빛을 통한 검출과 거리 측정)의 약칭으로, 근적외광 및 가시광, 자외선을 사용하여 대상물에 빛을 비추고, 그 반사광을 광 센서를 통해 검출하여 거리를 측정하는 리모트 센싱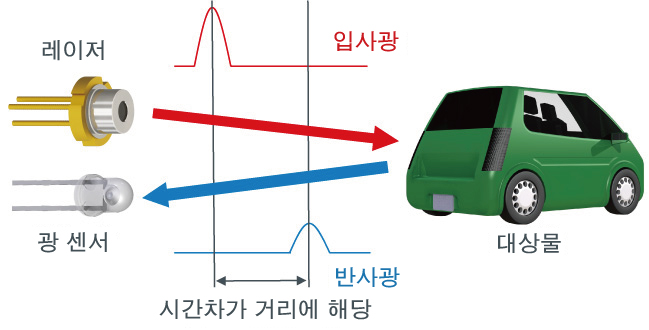 |
| 거리계산 | 거리는 다음과 같이 계산한다.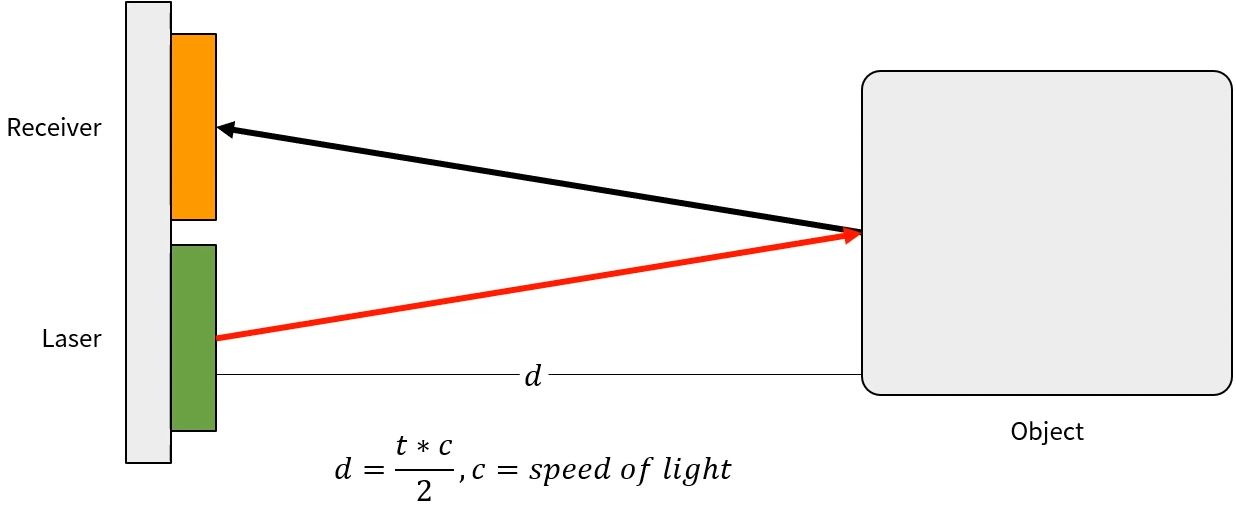 레이저 소스가 펄스화되고 각 펄스가 반사되어 센서로 돌아오는 데 걸리는 시간을 측정한다. 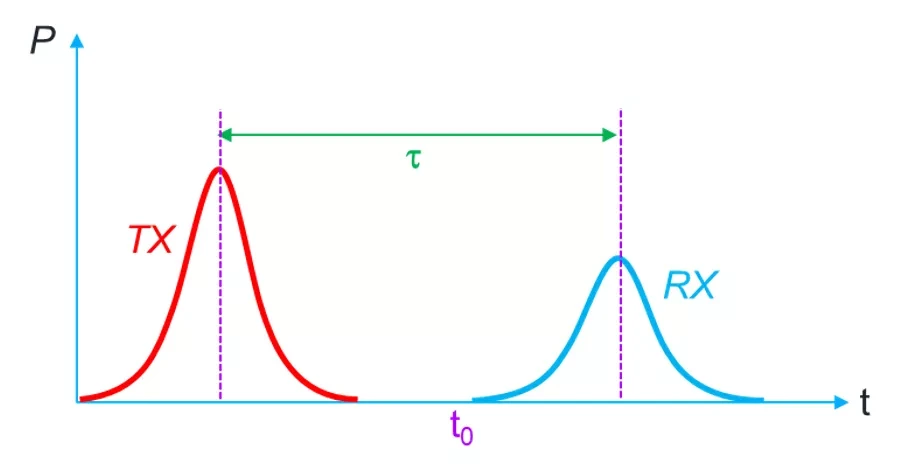 레이저 소스는 진폭 변조된다. 투과된 빛과 센서로 반사된 빛의 위상차를 측정한다. 이 위상차를 시간으로 변환한 후 빛의 속도를 사용하여 거리로 변환한다. 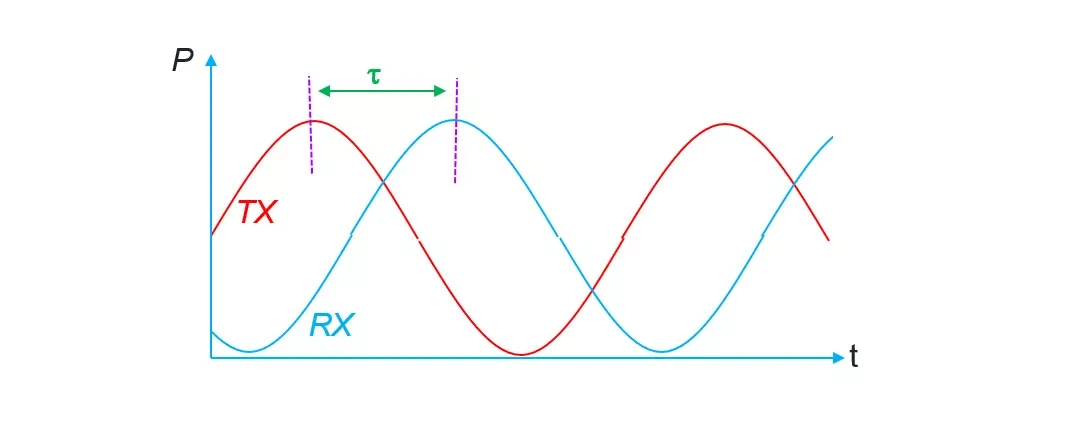 레이저 소스는 CW이고 톱니 파형("Chirp")으로 변조된 주파수이다. 반사된 신호가 소스의 레퍼런스와 광학적으로 혼합되어 신호는 스펙트럼 분석에 의해 추출된, 거리에 해당하는 "비트" 주파수를 포함한다. 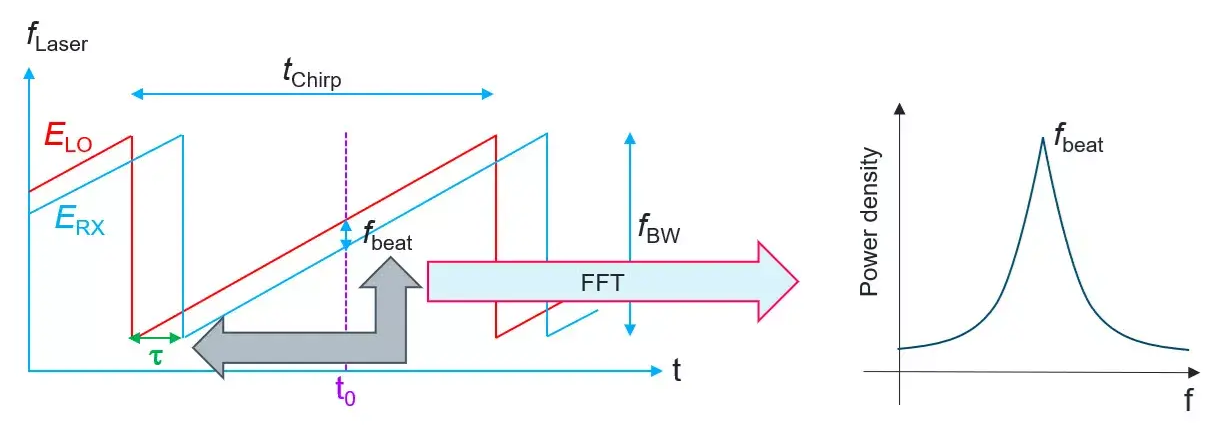 |
| 종류 | Solid-State LiDAR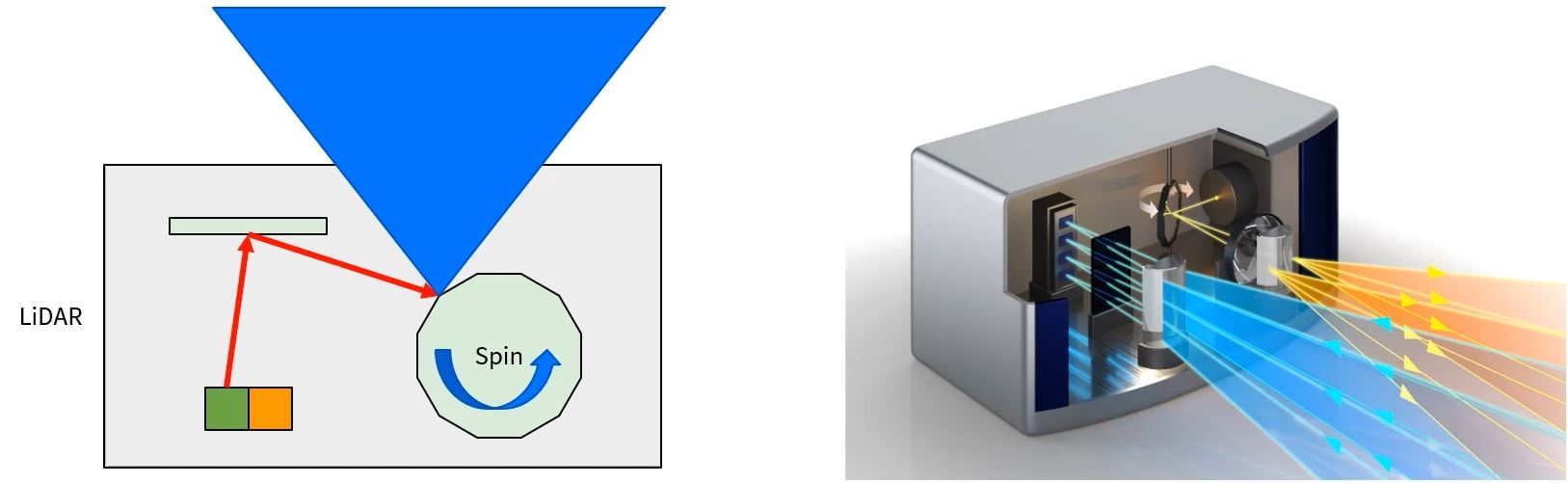 MEMS LiDAR 반사 물질을 상/하 & 좌/우 반복운동 하고, N개의 Laser를 사용할 수 있다. 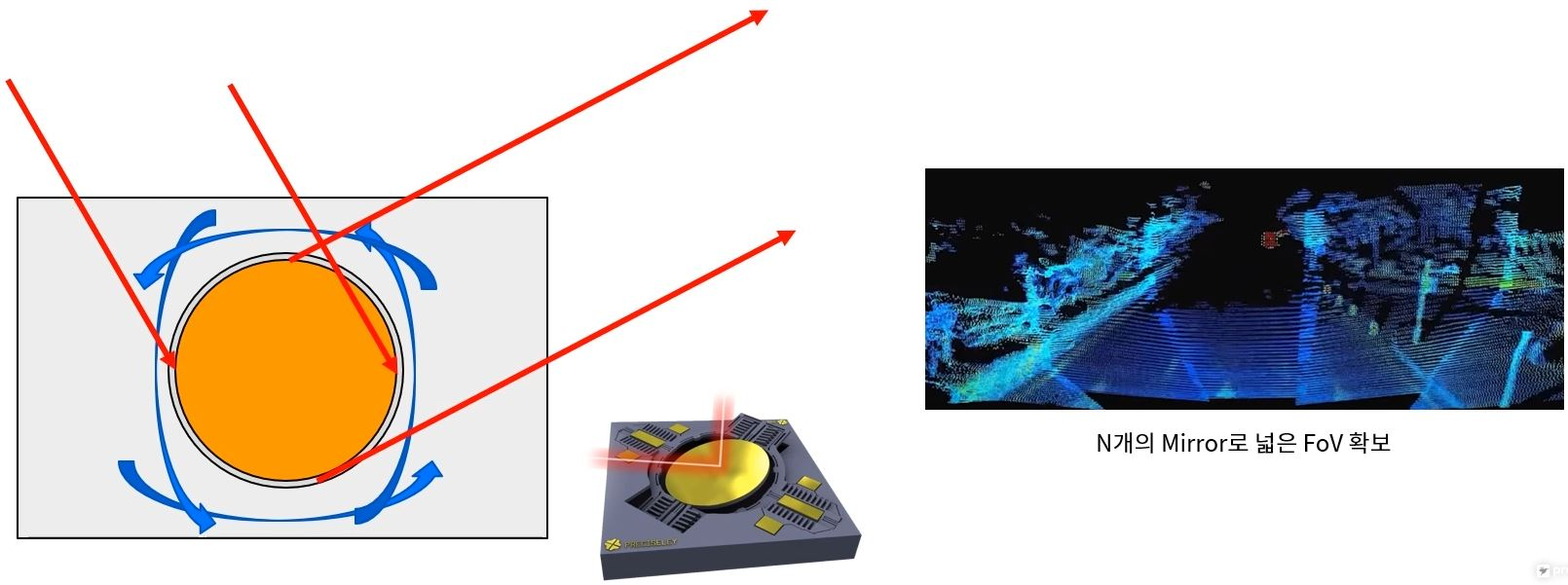 |
* RPLidar C1 드라이버 설치 및 테스트
| 구분 | 설명 |
| 설치 | 드라이버 사이트: https://github.com/Slamtec/rplidar_ros/tree/ros2 # 터틀봇3과 RemotePC 모두 설치한다. $ cd ~/ros2_ws/src $ git clone -b ros2 https://github.com/Slamtec/rplidar_ros.git $ cd ~/ros2_ws/ $ source /opt/ros/jazzy/setup.bash $ colcon build --symlink-install $ source ./install/setup.bash |
| 실행 | # 터틀봇3에서 실행하기 $ ros2 launch rplidar_ros rplidar_c1_launch.py # Remote PC에서 실행하기 $ ros2 launch rplidar_ros view_rplidar_c1_launch.py |
| 결과 | 결과 영상에서 Lidar가 동작하는 것을 보여준다. Fixed Frame: laser 또는 base_link 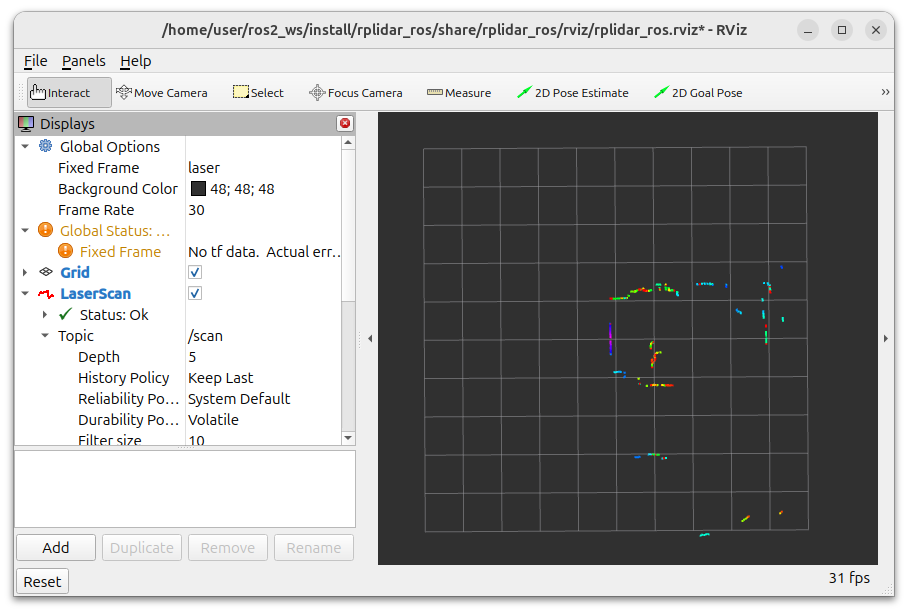 |
| topic 확인 | # Remote PC에서 실행하기 $ ros2 topic list $ ros2 topic echo /scan --once 다음 결과를 보면 범위가 0.15m ~ 16m 로 나온다. --- header: stamp: sec: 1780909396 nanosec: 651480589 frame_id: laser angle_min: -3.1241390705108643 angle_max: 3.1415927410125732 angle_increment: 0.008714509196579456 time_increment: 0.0001323226751992479 scan_time: 0.0951400101184845 range_min: 0.15000000596046448 range_max: 16.0 ranges: - 0.1509999930858612 - 0.15049999952316284 - 0.15150000154972076 - 0.15150000154972076 - .inf - 0.15074999630451202 - 0.15074999630451202 - 0.15150000154972076 - 0.15150000154972076 |
| scan 데이터 | # 물체를 5cm에 갖다대고 scan 데이터를 살펴보자. 만약에 0.15 이하로 내려가지 않을 경우 다음과 같이 수정해야 한다. |
* 파일 분석
| 파일 | 설명 |
| launch | $ gedit ~/ros2_ws/src/rplidar_ros/launch/rplidar_c1_launch.py #!/usr/bin/env python3 import os from ament_index_python.packages import get_package_share_directory from launch import LaunchDescription from launch.actions import DeclareLaunchArgument from launch.actions import LogInfo from launch.substitutions import LaunchConfiguration from launch_ros.actions import Node def generate_launch_description(): channel_type = LaunchConfiguration('channel_type', default='serial') serial_port = LaunchConfiguration('serial_port', default='/dev/ttyUSB0') serial_baudrate = LaunchConfiguration('serial_baudrate', default='460800') frame_id = LaunchConfiguration('frame_id', default='laser') inverted = LaunchConfiguration('inverted', default='false') angle_compensate = LaunchConfiguration('angle_compensate', default='true') scan_mode = LaunchConfiguration('scan_mode', default='Standard') return LaunchDescription([ DeclareLaunchArgument( 'channel_type', default_value=channel_type, description='Specifying channel type of lidar'), DeclareLaunchArgument( 'serial_port', default_value=serial_port, description='Specifying usb port to connected lidar'), DeclareLaunchArgument( 'serial_baudrate', default_value=serial_baudrate, description='Specifying usb port baudrate to connected lidar'), DeclareLaunchArgument( 'frame_id', default_value=frame_id, description='Specifying frame_id of lidar'), DeclareLaunchArgument( 'inverted', default_value=inverted, description='Specifying whether or not to invert scan data'), DeclareLaunchArgument( 'angle_compensate', default_value=angle_compensate, description='Specifying whether or not to enable angle_compensate of scan data'), DeclareLaunchArgument( 'scan_mode', default_value=scan_mode, description='Specifying scan mode of lidar'), Node( package='rplidar_ros', executable='rplidar_node', name='rplidar_node', parameters=[{'channel_type':channel_type, 'serial_port': serial_port, 'serial_baudrate': serial_baudrate, 'frame_id': frame_id, 'inverted': inverted, 'angle_compensate': angle_compensate, 'scan_mode': scan_mode}], output='screen'), ]) |
| view | $ gedit ~/ros2_ws/src/rplidar_ros/launch/view_rplidar_c1_launch.py #!/usr/bin/env python3 import os from ament_index_python.packages import get_package_share_directory from launch import LaunchDescription from launch.actions import DeclareLaunchArgument from launch.actions import LogInfo from launch.substitutions import LaunchConfiguration from launch_ros.actions import Node def generate_launch_description(): channel_type = LaunchConfiguration('channel_type', default='serial') serial_port = LaunchConfiguration('serial_port', default='/dev/ttyUSB0') serial_baudrate = LaunchConfiguration('serial_baudrate', default='460800') frame_id = LaunchConfiguration('frame_id', default='laser') inverted = LaunchConfiguration('inverted', default='false') angle_compensate = LaunchConfiguration('angle_compensate', default='true') scan_mode = LaunchConfiguration('scan_mode', default='Standard') rviz_config_dir = os.path.join( get_package_share_directory('rplidar_ros'), 'rviz', 'rplidar_ros.rviz') return LaunchDescription([ DeclareLaunchArgument( 'channel_type', default_value=channel_type, description='Specifying channel type of lidar'), DeclareLaunchArgument( 'serial_port', default_value=serial_port, description='Specifying usb port to connected lidar'), DeclareLaunchArgument( 'serial_baudrate', default_value=serial_baudrate, description='Specifying usb port baudrate to connected lidar'), DeclareLaunchArgument( 'frame_id', default_value=frame_id, description='Specifying frame_id of lidar'), DeclareLaunchArgument( 'inverted', default_value=inverted, description='Specifying whether or not to invert scan data'), DeclareLaunchArgument( 'angle_compensate', default_value=angle_compensate, description='Specifying whether or not to enable angle_compensate of scan data'), DeclareLaunchArgument( 'scan_mode', default_value=scan_mode, description='Specifying scan mode of lidar'), Node( package='rplidar_ros', executable='rplidar_node', name='rplidar_node', parameters=[{'channel_type':channel_type, 'serial_port': serial_port, 'serial_baudrate': serial_baudrate, 'frame_id': frame_id, 'inverted': inverted, 'angle_compensate': angle_compensate, 'scan_mode': scan_mode }], output='screen'), Node( package='rviz2', executable='rviz2', name='rviz2', arguments=['-d', rviz_config_dir], output='screen'), ]) |
* 터틀봇3에서 실행하기
| 구분 | 설명 |
| 장착하기 | 터틀봇3에 라이다를 설치한다. Lidar 뒷 변에 네 개의 다리를 연결한다. (나사 PH_M 2.5x8mm K: 검정색 머리둥근 볼트 M2.5x8mm) 그리고 패널에 4개의 나사로 연결한다.  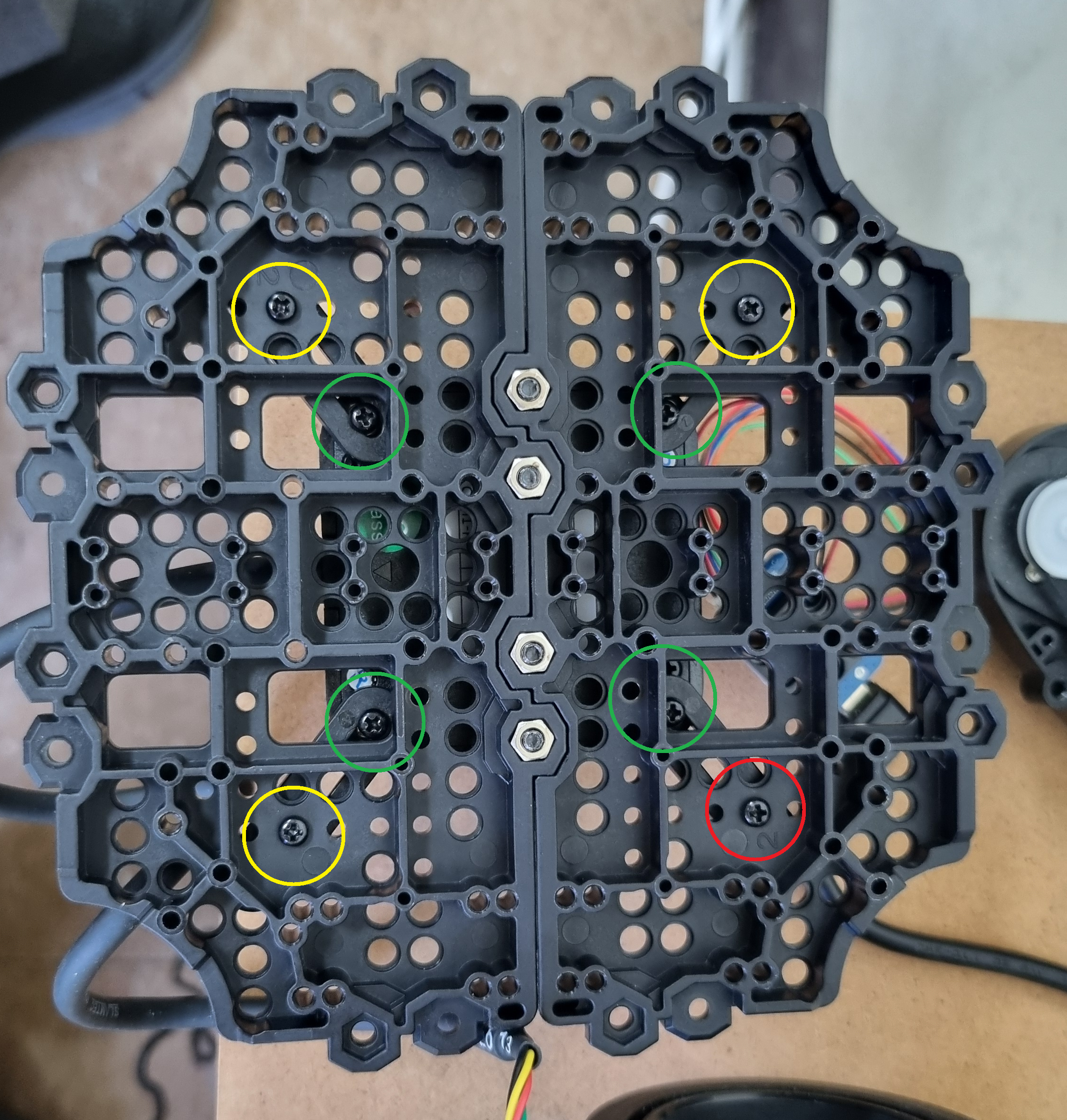 RPLidar C1을 UART2Usb adapter를 연결하고 USB 케이블을 라즈베리파에 연결한다. 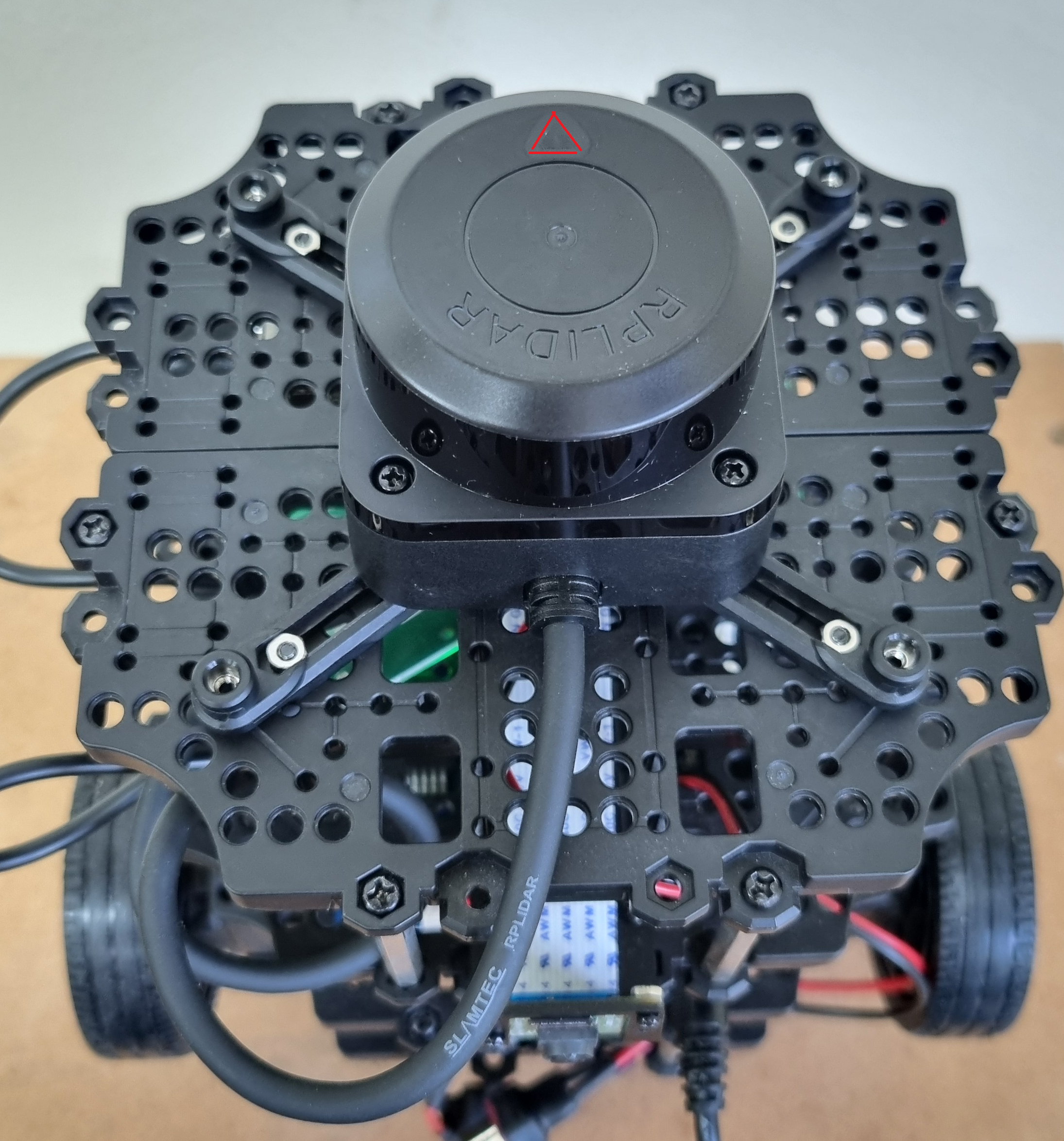 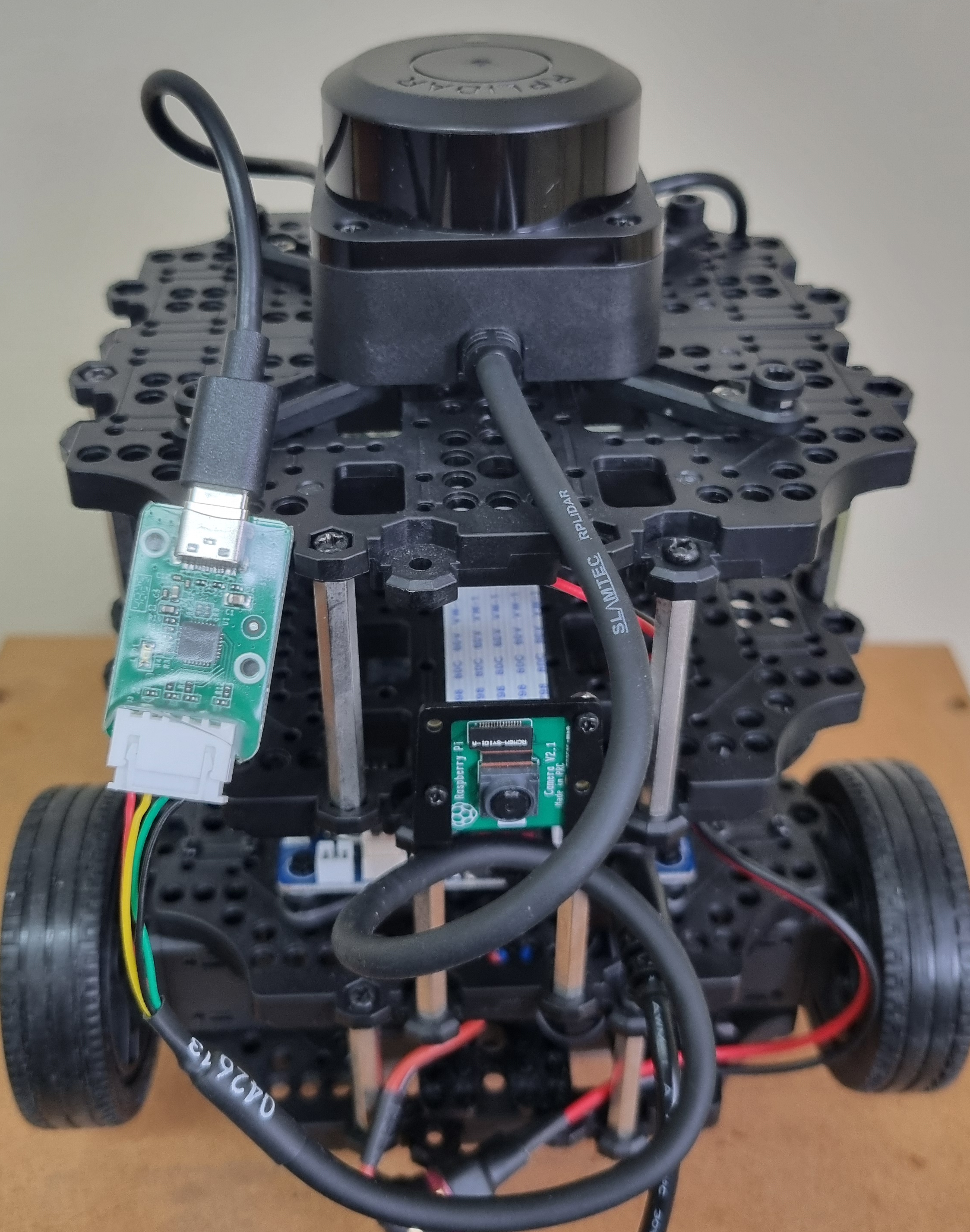 |
| 터틀봇3 bringup 파일 | # 터틀봇3에서 실행하기 $ vi ~/ros2_ws/src/turtlebot3/turtlebot3_bringup/launch/robot.launch.py 57: if LDS_MODEL == 'LDS-01': lidar_pkg_dir = LaunchConfiguration( 'lidar_pkg_dir', default=os.path.join(get_package_share_directory('hls_lfcd_lds_driver'), 'launch')) elif LDS_MODEL == 'LDS-02': lidar_pkg_dir = LaunchConfiguration( 'lidar_pkg_dir', default=os.path.join(get_package_share_directory('ld08_driver'), 'launch')) LDS_LAUNCH_FILE = '/ld08.launch.py' elif LDS_MODEL == 'LDS-03': lidar_pkg_dir = LaunchConfiguration( 'lidar_pkg_dir', default=os.path.join(get_package_share_directory('coin_d4_driver'), 'launch')) LDS_LAUNCH_FILE = '/single_lidar_node.launch.py' elif LDS_MODEL == 'RPLIDAR-C1': lidar_pkg_dir = LaunchConfiguration( 'lidar_pkg_dir', default=os.path.join(get_package_share_directory('rplidar_ros'), 'launch')) LDS_LAUNCH_FILE = '/rplidar_c1_launch.py' else: lidar_pkg_dir = LaunchConfiguration( 'lidar_pkg_dir', default=os.path.join(get_package_share_directory('hls_lfcd_lds_driver'), 'launch')) |
| 터틀봇3 소스 수정 | # 라이다의 range 범위를 수정한다. $ vi ~/ros2_ws/src/rplidar_ros/src/rplidar_node.cpp 256: scan_msg->range_min = 0.15; // 0.05로 수정한다. scan_msg->range_max = max_distance; //8.0; # 다시 컴파일 한다. cd ~/ros2_ws/ colcon build --symlink-install |
| 터틀봇3 Model 변경 | # Turtulebot3에서 실행 $ gedit ~/.bashrc 라이다 모델명을 다음과 같이 변경한다. export LDS_MODEL=RPLIDAR-C1 $ ros2 launch turtlebot3_bringup robot.launch.py |
| RemotePC 실험 | # Remote PC에서 실행하기 # Driver 설치하기 cd ~/ros2_ws/src git clone -b ros2 https://github.com/Slamtec/rplidar_ros.git cd ~/ros2_ws/ source /opt/ros/jazzy/setup.bash colcon build --symlink-install $ ros2 launch rplidar_ros view_rplidar_c1_launch.py 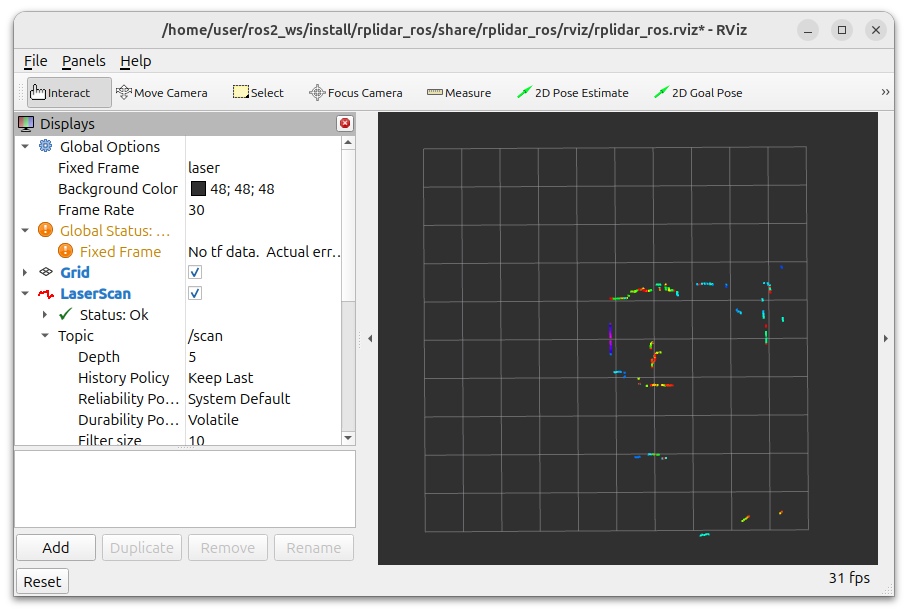 |
| 토픽 확인 | # 토픽 /scan을 통해 라이다 범위를 확인한다. $ ros2 topic echo /scan --once 다음 결과를 보면 범위가 0.05m ~ 16m 로 나온다. --- header: stamp: sec: 1780909396 nanosec: 651480589 frame_id: laser angle_min: -3.1241390705108643 angle_max: 3.1415927410125732 angle_increment: 0.008714509196579456 time_increment: 0.0001323226751992479 scan_time: 0.0951400101184845 range_min: 0.05000000596046448 range_max: 16.0 ranges: - 3.9257500171661377 - 3.92549991607666 - 3.927000045776367 - 3.927000045776367 - 3.928999900817871 - 3.930000066757202 - .inf - 3.9352500438690186 - 3.9352500438690186 |
* RPLidar 소스
| 파일 | 코드 |
| view_rplidar_c1_launch.py | $ vi ~/ros2_ws/src/rplidar_ros/src/launch/view_rplidar_c1_launch.py #!/usr/bin/env python3 import os from ament_index_python.packages import get_package_share_directory from launch import LaunchDescription from launch.actions import DeclareLaunchArgument from launch.actions import LogInfo from launch.substitutions import LaunchConfiguration from launch_ros.actions import Node def generate_launch_description(): channel_type = LaunchConfiguration('channel_type', default='serial') serial_port = LaunchConfiguration('serial_port', default='/dev/ttyUSB0') serial_baudrate = LaunchConfiguration('serial_baudrate', default='460800') frame_id = LaunchConfiguration('frame_id', default='laser') inverted = LaunchConfiguration('inverted', default='false') angle_compensate = LaunchConfiguration('angle_compensate', default='true') scan_mode = LaunchConfiguration('scan_mode', default='Standard') rviz_config_dir = os.path.join( get_package_share_directory('rplidar_ros'), 'rviz', 'rplidar_ros.rviz') return LaunchDescription([ DeclareLaunchArgument( 'channel_type', default_value=channel_type, description='Specifying channel type of lidar'), DeclareLaunchArgument( 'serial_port', default_value=serial_port, description='Specifying usb port to connected lidar'), DeclareLaunchArgument( 'serial_baudrate', default_value=serial_baudrate, description='Specifying usb port baudrate to connected lidar'), DeclareLaunchArgument( 'frame_id', default_value=frame_id, description='Specifying frame_id of lidar'), DeclareLaunchArgument( 'inverted', default_value=inverted, description='Specifying whether or not to invert scan data'), DeclareLaunchArgument( 'angle_compensate', default_value=angle_compensate, description='Specifying whether or not to enable angle_compensate of scan data'), DeclareLaunchArgument( 'scan_mode', default_value=scan_mode, description='Specifying scan mode of lidar'), Node( package='rplidar_ros', executable='rplidar_node', name='rplidar_node', parameters=[{'channel_type':channel_type, 'serial_port': serial_port, 'serial_baudrate': serial_baudrate, 'frame_id': frame_id, 'inverted': inverted, 'angle_compensate': angle_compensate, 'scan_mode': scan_mode }], output='screen'), Node( package='rviz2', executable='rviz2', name='rviz2', arguments=['-d', rviz_config_dir], output='screen'), ]) |
| rplidar_client | $ vi ~/ros2_ws/src/rplidar_ros/src/rplidar_client.cpp #include "rclcpp/rclcpp.hpp" #include "sensor_msgs/msg/laser_scan.hpp" #include <math.h> #define RAD2DEG(x) ((x)*180./M_PI) static void scanCb(sensor_msgs::msg::LaserScan::SharedPtr scan) { int count = scan->scan_time / scan->time_increment; printf("[SLLIDAR INFO]: I heard a laser scan %s[%d]:\n", scan->header.frame_id.c_str(), count); printf("[SLLIDAR INFO]: angle_range : [%f, %f]\n", RAD2DEG(scan->angle_min), RAD2DEG(scan->angle_max)); for (int i = 0; i < count; i++) { float degree = RAD2DEG(scan->angle_min + scan->angle_increment * i); printf("[SLLIDAR INFO]: angle-distance : [%f, %f]\n", degree, scan->ranges[i]); } } int main(int argc, char **argv) { rclcpp::init(argc, argv); auto node = rclcpp::Node::make_shared("sllidar_client"); auto lidar_info_sub = node->create_subscription<sensor_msgs::msg::LaserScan>( "scan", rclcpp::SensorDataQoS(), scanCb); rclcpp::spin(node); rclcpp::shutdown(); return 0; } |
| rplidar_node | $ vi ~/ros2_ws/src/rplidar_ros/src/rplidar_node.cpp /* RPLIDAR ROS2 NODE * http://www.slamtec.com */ #include <rclcpp/rclcpp.hpp> #include <sensor_msgs/msg/laser_scan.hpp> #include <std_srvs/srv/empty.hpp> #include "sl_lidar.h" #include "math.h" #include <signal.h> #ifndef _countof #define _countof(_Array) (int)(sizeof(_Array) / sizeof(_Array[0])) #endif #define DEG2RAD(x) ((x)*M_PI/180.) #define ROS2VERSION "1.0.1" enum { LIDAR_A_SERIES_MINUM_MAJOR_ID = 0, LIDAR_S_SERIES_MINUM_MAJOR_ID = 5, LIDAR_T_SERIES_MINUM_MAJOR_ID = 8, }; using namespace sl; bool need_exit = false; class RPlidarNode : public rclcpp::Node { public: RPlidarNode(const rclcpp::NodeOptions& options = rclcpp::NodeOptions()) : Node("rplidar_node", options) { } private: void init_param() { this->declare_parameter<std::string>("channel_type","serial"); this->declare_parameter<std::string>("tcp_ip", "192.168.0.7"); this->declare_parameter<int>("tcp_port", 20108); this->declare_parameter<std::string>("udp_ip","192.168.11.2"); this->declare_parameter<int>("udp_port",8089); this->declare_parameter<std::string>("serial_port", "/dev/ttyUSB0"); this->declare_parameter<int>("serial_baudrate",1000000); this->declare_parameter<std::string>("frame_id","laser_frame"); this->declare_parameter<bool>("inverted", false); this->declare_parameter<bool>("angle_compensate", false); this->declare_parameter<bool>("flip_x_axis", false); this->declare_parameter<bool>("auto_standby", false); this->declare_parameter<std::string>("topic_name",std::string("scan")); this->declare_parameter<std::string>("scan_mode",std::string()); this->declare_parameter<float>("scan_frequency",10); this->get_parameter_or<std::string>("channel_type", channel_type, "serial"); this->get_parameter_or<std::string>("tcp_ip", tcp_ip, "192.168.0.7"); this->get_parameter_or<int>("tcp_port", tcp_port, 20108); this->get_parameter_or<std::string>("udp_ip", udp_ip, "192.168.11.2"); this->get_parameter_or<int>("udp_port", udp_port, 8089); this->get_parameter_or<std::string>("serial_port", serial_port, "/dev/ttyUSB0"); this->get_parameter_or<int>("serial_baudrate", serial_baudrate, 1000000/*256000*/);//ros run for A1 A2, change to 256000 if A3 this->get_parameter_or<std::string>("frame_id", frame_id, "laser_frame"); this->get_parameter_or<bool>("inverted", inverted, false); this->get_parameter_or<bool>("angle_compensate", angle_compensate, false); this->get_parameter_or<bool>("flip_x_axis", flip_x_axis, false); this->get_parameter_or<bool>("auto_standby", auto_standby, false); this->get_parameter_or<std::string>("topic_name", topic_name, "scan"); this->get_parameter_or<std::string>("scan_mode", scan_mode, std::string()); if(channel_type == "udp") this->get_parameter_or<float>("scan_frequency", scan_frequency, 20.0); else this->get_parameter_or<float>("scan_frequency", scan_frequency, 10.0); } bool getRPLIDARDeviceInfo(ILidarDriver * drv) { sl_result op_result; sl_lidar_response_device_info_t devinfo; op_result = drv->getDeviceInfo(devinfo); if (SL_IS_FAIL(op_result)) { if (op_result == SL_RESULT_OPERATION_TIMEOUT) { RCLCPP_ERROR(this->get_logger(),"Error, operation time out. SL_RESULT_OPERATION_TIMEOUT! "); } else { RCLCPP_ERROR(this->get_logger(),"Error, unexpected error, code: %x",op_result); } return false; } // print out the device serial number, firmware and hardware version number.. char sn_str[37] = {'\0'}; for (int pos = 0; pos < 16 ;++pos) { sprintf(sn_str + (pos * 2),"%02X", devinfo.serialnum[pos]); } RCLCPP_INFO(this->get_logger(),"RPLidar S/N: %s",sn_str); RCLCPP_INFO(this->get_logger(),"Firmware Ver: %d.%02d",devinfo.firmware_version>>8, devinfo.firmware_version & 0xFF); RCLCPP_INFO(this->get_logger(),"Hardware Rev: %d",(int)devinfo.hardware_version); return true; } bool checkRPLIDARHealth(ILidarDriver * drv) { sl_result op_result; sl_lidar_response_device_health_t healthinfo; op_result = drv->getHealth(healthinfo); if (SL_IS_OK(op_result)) { RCLCPP_INFO(this->get_logger(),"RPLidar health status : %d", healthinfo.status); switch (healthinfo.status) { case SL_LIDAR_STATUS_OK: RCLCPP_INFO(this->get_logger(),"RPLidar health status : OK."); return true; case SL_LIDAR_STATUS_WARNING: RCLCPP_INFO(this->get_logger(),"RPLidar health status : Warning."); return true; case SL_LIDAR_STATUS_ERROR: RCLCPP_ERROR(this->get_logger(),"Error, RPLidar internal error detected. Please reboot the device to retry."); return false; default: RCLCPP_ERROR(this->get_logger(),"Error, Unknown internal error detected. Please reboot the device to retry."); return false; } } else { RCLCPP_ERROR(this->get_logger(),"Error, cannot retrieve RPLidar health code: %x", op_result); return false; } } bool stop_motor(const std::shared_ptr<std_srvs::srv::Empty::Request> req, std::shared_ptr<std_srvs::srv::Empty::Response> res) { (void)req; (void)res; if (auto_standby) { RCLCPP_INFO( this->get_logger(), "Ingnoring stop_motor request because rplidar_node is in 'auto standby' mode"); return false; } RCLCPP_DEBUG(this->get_logger(), "Call to '%s'", __FUNCTION__); //RCLCPP_DEBUG(this->get_logger(),"Stop motor"); this->stop(); //drv->setMotorSpeed(0); return true; } bool start_motor(const std::shared_ptr<std_srvs::srv::Empty::Request> req, std::shared_ptr<std_srvs::srv::Empty::Response> res) { (void)req; (void)res; if (auto_standby) { RCLCPP_INFO( this->get_logger(), "Ingnoring start_motor request because rplidar_node is in 'auto standby' mode"); return false; } RCLCPP_DEBUG(this->get_logger(), "Call to '%s'", __FUNCTION__); return this->start(); #if 0 if(!drv) return false; if(drv->isConnected()) { RCLCPP_DEBUG(this->get_logger(),"Start motor"); sl_result ans=drv->setMotorSpeed(); if (SL_IS_FAIL(ans)) { RCLCPP_WARN(this->get_logger(), "Failed to start motor: %08x", ans); return false; } ans=drv->startScan(0,1); if (SL_IS_FAIL(ans)) { RCLCPP_WARN(this->get_logger(), "Failed to start scan: %08x", ans); } } else { RCLCPP_INFO(this->get_logger(),"lost connection"); return false; } return true; #endif } static float getAngle(const sl_lidar_response_measurement_node_hq_t& node) { return node.angle_z_q14 * 90.f / 16384.f; } void publish_scan(rclcpp::Publisher<sensor_msgs::msg::LaserScan>::SharedPtr& pub, sl_lidar_response_measurement_node_hq_t *nodes, size_t node_count, rclcpp::Time start, double scan_time, bool inverted, bool flip_X_axis, float angle_min, float angle_max, float max_distance, std::string frame_id) { static int scan_count = 0; auto scan_msg = std::make_shared<sensor_msgs::msg::LaserScan>(); scan_msg->header.stamp = start; scan_msg->header.frame_id = frame_id; scan_count++; bool reversed = (angle_max > angle_min); if ( reversed ) { scan_msg->angle_min = M_PI - angle_max; scan_msg->angle_max = M_PI - angle_min; } else { scan_msg->angle_min = M_PI - angle_min; scan_msg->angle_max = M_PI - angle_max; } scan_msg->angle_increment = (scan_msg->angle_max - scan_msg->angle_min) / (double)(node_count-1); scan_msg->scan_time = scan_time; scan_msg->time_increment = scan_time / (double)(node_count-1); scan_msg->range_min = 0.05; scan_msg->range_max = max_distance;//8.0; scan_msg->intensities.resize(node_count); scan_msg->ranges.resize(node_count); bool reverse_data = (!inverted && reversed) || (inverted && !reversed); size_t scan_midpoint = node_count / 2; for (size_t i = 0; i < node_count; i++) { float read_value = (float)nodes[i].dist_mm_q2 / 4.0f / 1000; size_t apply_index = i; if (reverse_data) { apply_index = node_count - 1 - i; } if (flip_X_axis) { if (apply_index >= scan_midpoint) apply_index = apply_index - scan_midpoint; else apply_index = apply_index + scan_midpoint; } if (read_value == 0.0) scan_msg->ranges[apply_index] = std::numeric_limits<float>::infinity(); else scan_msg->ranges[apply_index] = read_value; scan_msg->intensities[apply_index] = (float)(nodes[apply_index].quality >> 2); } pub->publish(*scan_msg); } bool set_scan_mode() { sl_result op_result; LidarScanMode current_scan_mode; if (scan_mode.empty()) { op_result = drv->startScan(false /* not force scan */, true /* use typical scan mode */, 0, ¤t_scan_mode); } else { std::vector<LidarScanMode> allSupportedScanModes; op_result = drv->getAllSupportedScanModes(allSupportedScanModes); if (SL_IS_OK(op_result)) { sl_u16 selectedScanMode = sl_u16(-1); for (std::vector<LidarScanMode>::iterator iter = allSupportedScanModes.begin(); iter != allSupportedScanModes.end(); iter++) { if (iter->scan_mode == scan_mode) { selectedScanMode = iter->id; break; } } if (selectedScanMode == sl_u16(-1)) { RCLCPP_ERROR(this->get_logger(), "scan mode `%s' is not supported by lidar, supported modes:", scan_mode.c_str()); for (std::vector<LidarScanMode>::iterator iter = allSupportedScanModes.begin(); iter != allSupportedScanModes.end(); iter++) { RCLCPP_ERROR(this->get_logger(), "\t%s: max_distance: %.1f m, Point number: %.1fK", iter->scan_mode, iter->max_distance, (1000 / iter->us_per_sample)); } op_result = SL_RESULT_OPERATION_FAIL; } else { op_result = drv->startScanExpress(false /* not force scan */, selectedScanMode, 0, ¤t_scan_mode); } } } if (SL_IS_OK(op_result)) { //default frequent is 10 hz (by motor pwm value), current_scan_mode.us_per_sample is the number of scan point per us int points_per_circle = (int)(1000 * 1000 / current_scan_mode.us_per_sample / scan_frequency); angle_compensate_multiple = points_per_circle / 360.0 + 1; if (angle_compensate_multiple < 1) angle_compensate_multiple = 1.0; max_distance = (float)current_scan_mode.max_distance; RCLCPP_INFO(this->get_logger(), "current scan mode: %s, sample rate: %d Khz, max_distance: %.1f m, scan frequency:%.1f Hz, ", current_scan_mode.scan_mode, (int)(1000 / current_scan_mode.us_per_sample + 0.5), max_distance, scan_frequency); return true; } else { RCLCPP_ERROR(this->get_logger(), "Can not start scan: %08x!", op_result); return false; } } bool start() { if (nullptr == drv) { return false; } RCLCPP_INFO(this->get_logger(), "Start"); drv->setMotorSpeed(); if (!set_scan_mode()) { this->stop(); RCLCPP_ERROR(this->get_logger(), "Failed to set scan mode"); return false; } is_scanning = true; return true; } void stop() { if (nullptr == drv) { return; } RCLCPP_INFO(this->get_logger(), "Stop"); drv->stop(); drv->setMotorSpeed(0); is_scanning = false; } public: int work_loop() { init_param(); int ver_major = SL_LIDAR_SDK_VERSION_MAJOR; int ver_minor = SL_LIDAR_SDK_VERSION_MINOR; int ver_patch = SL_LIDAR_SDK_VERSION_PATCH; RCLCPP_INFO(this->get_logger(),"RPLidar running on ROS2 package rplidar_ros. RPLIDAR SDK Version:%d.%d.%d",ver_major,ver_minor,ver_patch); sl_result op_result; // create the driver instance drv = *createLidarDriver(); if (nullptr == drv) { /* don't start spinning without a driver object */ RCLCPP_ERROR(this->get_logger(), "Failed to construct driver"); return -1; } IChannel* _channel; if(channel_type == "tcp"){ _channel = *createTcpChannel(tcp_ip, tcp_port); } else if(channel_type == "udp"){ _channel = *createUdpChannel(udp_ip, udp_port); } else{ _channel = *createSerialPortChannel(serial_port, serial_baudrate); } if (SL_IS_FAIL((drv)->connect(_channel))) { if(channel_type == "tcp"){ RCLCPP_ERROR(this->get_logger(),"Error, cannot connect to the ip addr %s with the tcp port %s.",tcp_ip.c_str(),std::to_string(tcp_port).c_str()); } else if(channel_type == "udp"){ RCLCPP_ERROR(this->get_logger(),"Error, cannot connect to the ip addr %s with the udp port %s.",udp_ip.c_str(),std::to_string(udp_port).c_str()); } else{ RCLCPP_ERROR(this->get_logger(),"Error, cannot bind to the specified serial port %s.",serial_port.c_str()); } delete drv; drv = nullptr; return -1; } // get rplidar device info if (!getRPLIDARDeviceInfo(drv)) { delete drv; drv = nullptr; return -1; } // check health... if (!checkRPLIDARHealth(drv)) { delete drv; drv = nullptr; return -1; } sl_lidar_response_device_info_t devinfo; op_result = drv->getDeviceInfo(devinfo); bool scan_frequency_tunning_after_scan = false; if( (devinfo.model>>4) > LIDAR_S_SERIES_MINUM_MAJOR_ID){ scan_frequency_tunning_after_scan = true; } if(!scan_frequency_tunning_after_scan){ //for RPLIDAR A serials //start RPLIDAR A serials rotate by pwm drv->setMotorSpeed(600); } /* start motor and scanning */ if (!auto_standby && !this->start()) { delete drv; drv = nullptr; return -1; } scan_pub = this->create_publisher<sensor_msgs::msg::LaserScan>(topic_name, rclcpp::QoS(rclcpp::KeepLast(10))); stop_motor_service = this->create_service<std_srvs::srv::Empty>("stop_motor", std::bind(&RPlidarNode::stop_motor,this,std::placeholders::_1,std::placeholders::_2)); start_motor_service = this->create_service<std_srvs::srv::Empty>("start_motor", std::bind(&RPlidarNode::start_motor,this,std::placeholders::_1,std::placeholders::_2)); //drv->setMotorSpeed(); rclcpp::Time start_scan_time; rclcpp::Time end_scan_time; double scan_duration; while (rclcpp::ok() && !need_exit) { sl_lidar_response_measurement_node_hq_t nodes[8192]; size_t count = _countof(nodes); if (auto_standby) { if (scan_pub->get_subscription_count() > 0 && !is_scanning) { this->start(); } else if (scan_pub->get_subscription_count() == 0) { if (is_scanning) { this->stop(); } } } start_scan_time = this->now(); op_result = drv->grabScanDataHq(nodes, count); end_scan_time = this->now(); scan_duration = (end_scan_time - start_scan_time).seconds(); if (op_result == SL_RESULT_OK) { if(scan_frequency_tunning_after_scan) { //Set scan frequency(For Slamtec Tof lidar) RCLCPP_INFO(this->get_logger(), "set lidar scan frequency to %.1f Hz(%.1f Rpm) ",scan_frequency,scan_frequency*60); drv->setMotorSpeed(scan_frequency*60); //rpm scan_frequency_tunning_after_scan = false; continue; } op_result = drv->ascendScanData(nodes, count); float angle_min = DEG2RAD(0.0f); float angle_max = DEG2RAD(359.0f); if (op_result == SL_RESULT_OK) { if (angle_compensate) { //const int angle_compensate_multiple = 1; const int angle_compensate_nodes_count = 360*angle_compensate_multiple; int angle_compensate_offset = 0; auto angle_compensate_nodes = new sl_lidar_response_measurement_node_hq_t[angle_compensate_nodes_count]; memset(angle_compensate_nodes, 0, angle_compensate_nodes_count*sizeof(sl_lidar_response_measurement_node_hq_t)); size_t i = 0, j = 0; for( ; i < count; i++ ) { if (nodes[i].dist_mm_q2 != 0) { float angle = getAngle(nodes[i]); int angle_value = (int)(angle * angle_compensate_multiple); if ((angle_value - angle_compensate_offset) < 0) angle_compensate_offset = angle_value; for (j = 0; j < angle_compensate_multiple; j++) { int angle_compensate_nodes_index = angle_value-angle_compensate_offset + j; if(angle_compensate_nodes_index >= angle_compensate_nodes_count) angle_compensate_nodes_index = angle_compensate_nodes_count - 1; angle_compensate_nodes[angle_compensate_nodes_index] = nodes[i]; } } } publish_scan(scan_pub, angle_compensate_nodes, angle_compensate_nodes_count, start_scan_time, scan_duration, inverted, flip_x_axis, angle_min, angle_max, max_distance, frame_id); if (angle_compensate_nodes) { delete[] angle_compensate_nodes; angle_compensate_nodes = nullptr; } } else { int start_node = 0, end_node = 0; int i = 0; // find the first valid node and last valid node while (nodes[i++].dist_mm_q2 == 0); start_node = i-1; i = count -1; while (nodes[i--].dist_mm_q2 == 0); end_node = i+1; angle_min = DEG2RAD(getAngle(nodes[start_node])); angle_max = DEG2RAD(getAngle(nodes[end_node])); publish_scan(scan_pub, &nodes[start_node], end_node-start_node +1, start_scan_time, scan_duration, inverted, flip_x_axis, angle_min, angle_max, max_distance, frame_id); } } else if (op_result == SL_RESULT_OPERATION_FAIL) { // All the data is invalid, just publish them float angle_min = DEG2RAD(0.0f); float angle_max = DEG2RAD(359.0f); publish_scan(scan_pub, nodes, count, start_scan_time, scan_duration, inverted, flip_x_axis, angle_min, angle_max, max_distance, frame_id); } } rclcpp::spin_some(shared_from_this()); } // done! drv->setMotorSpeed(0); drv->stop(); RCLCPP_INFO(this->get_logger(),"Stop motor"); if (drv) { delete drv; drv = nullptr; } return 0; } private: rclcpp::Publisher<sensor_msgs::msg::LaserScan>::SharedPtr scan_pub; rclcpp::Service<std_srvs::srv::Empty>::SharedPtr start_motor_service; rclcpp::Service<std_srvs::srv::Empty>::SharedPtr stop_motor_service; std::string channel_type; std::string tcp_ip; std::string udp_ip; std::string serial_port; std::string topic_name; int tcp_port = 20108; int udp_port = 8089; int serial_baudrate = 115200; std::string frame_id; bool inverted = false; bool angle_compensate = true; bool flip_x_axis = false; bool auto_standby = false; float max_distance = 8.0; size_t angle_compensate_multiple = 1;//it stand of angle compensate at per 1 degree std::string scan_mode; float scan_frequency; /* State */ bool is_scanning = false; ILidarDriver *drv = nullptr; }; void ExitHandler(int sig) { (void)sig; need_exit = true; } int main(int argc, char * argv[]) { rclcpp::init(argc, argv); auto rplidar_node = std::make_shared<RPlidarNode>(rclcpp::NodeOptions()); signal(SIGINT,ExitHandler); int ret = rplidar_node->work_loop(); rclcpp::shutdown(); return ret; } |
다음검색